11

Who said robots had to be all work and no play? For many years, people have been designing and building robots not just to help with chores, but to help us win games. Possibly the most famous examples of this are the robots that play chess.
In this article, we’ll take a look at the history of chess-playing robots, how they’ve evolved over time, and share three famous examples.
And do not forget that with the right inspiration, Arduino, and the Arduino Cloud, creating a robot is not a dream anymore!
The history of robots in chess — Three famous robotic chess prodigies
Chess is an old game. Humans have been playing it for 1,400 years, and for the vast majority of that time, their only opponents were other humans.
As time went on and technology became more advanced, people started to turn their thoughts to ways of using tech to win at chess. One of the first (somewhat clumsy) attempts came in the 18th century.
The Turk
The Mechanical Turk, developed in 1770 by Wolfgang von Kempelen, stunned audiences by repeatedly holding its own against human opponents. The world had changed forever — were machines finally beginning to outsmart their makers!?
Well… not exactly. The Turk actually turned out to be a case of fraud — and featured a human chess player hiding inside the machine and controlling its movements. False alarm.
The Mechanical Turk was destroyed by fire in 1854, after a perplexingly long career.
Boris Handroid
Throughout the 20th century, people worked furiously to build machines that could beat humans at chess. Progress slowly chugged along, and in 1980 the first commercially available chess robot came into being.
It was based on a chess computer called Boris and was extremely rare and limited, to the point where many people doubted it even existed. Due to its incredibly exclusive nature, it’s no surprise that the Handroid never became a household name.
The Milton Bradley Computers
Although the Handroid was not exactly a success story, it did show the world that there was at least an appetite for chess-playing robots, if they could be made effectively and at scale.
In the early 1980s, American board game giant Milton Bradley decided to take on the challenge. Working with computer scientists, they began to develop a robotic chess game that would move the pieces reliably enough to be sold at a mass scale.
The result was actually three different models: the Grandmaster that hit the US market, the Milton which was sold in Germany, France, and the Netherlands, and the Phantom which was built for the British market — although all three devices were extremely similar.
The Milton Bradley chessboard was able to detect where pieces were and used magnets attached to motor-driven belts to pull the pieces around the board. Unlike most of its predecessors, the Milton Bradley chess robot was a success and sold many copies in the US and Europe.
For chess aficionados, an important moment had arrived — you could now play chess at home without the need for a human opponent.
Deep Blue
Although it’s more of a computer program than a robot per se, no article about chess-playing robots would be complete without a mention of Deep Blue. Built on an IBM supercomputer, Deep Blue was the culmination of many years of grueling research and programming — a computer that could finally challenge a human chess champion.
In a series of games over the course of 1996 and 1997 — 10 years after development began on the project at Carnegie Mellon University — Deep Blue beat chess grandmaster Garry Kasparov.
It was a groundbreaking moment not just for chess, but for humanity as a whole — a reminder that, as advanced and intelligent as we are, the machines might just be catching us up.
Build your own chess robots
Today, you don’t need to rely on astronomically expensive novelty gadgets to experience the wonders of chess-playing robots — you can easily make your own at home. With tools like Arduino, amateur tech enthusiasts can assemble chess-playing machines for relatively low cost and without the need for a highly specialized skillset.
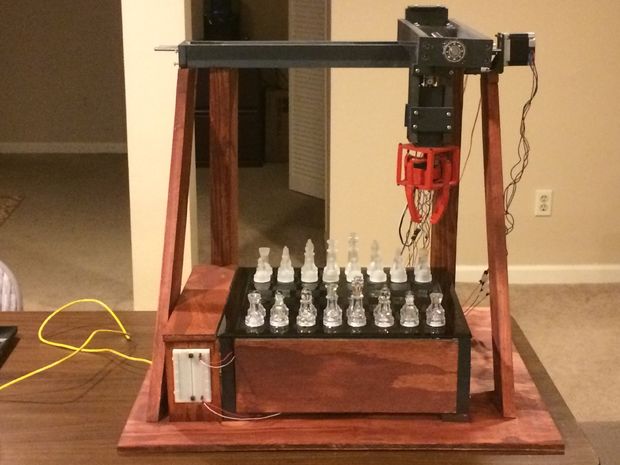
The Arduino Project Hub is home to a ton of chess-related projects, including some robots. YouTuber RobotAvatar built this machine that uses 64 reed switches to direct an Arduino Uno where each chess piece is.
Meanwhile, a computer running a Python program takes care of the “thinking” and sends signals to the device to move pieces. It’s a pretty straightforward device that literally adds an extra dimension to the game of computerized chess — allowing you to play games against machines in a much more tangible way.
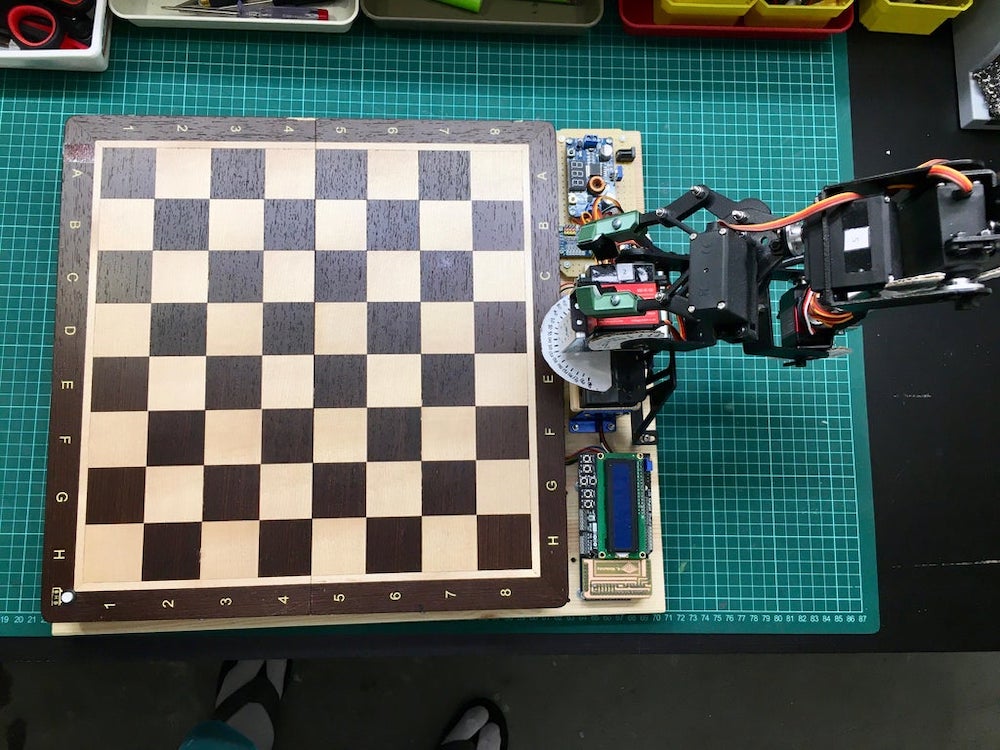
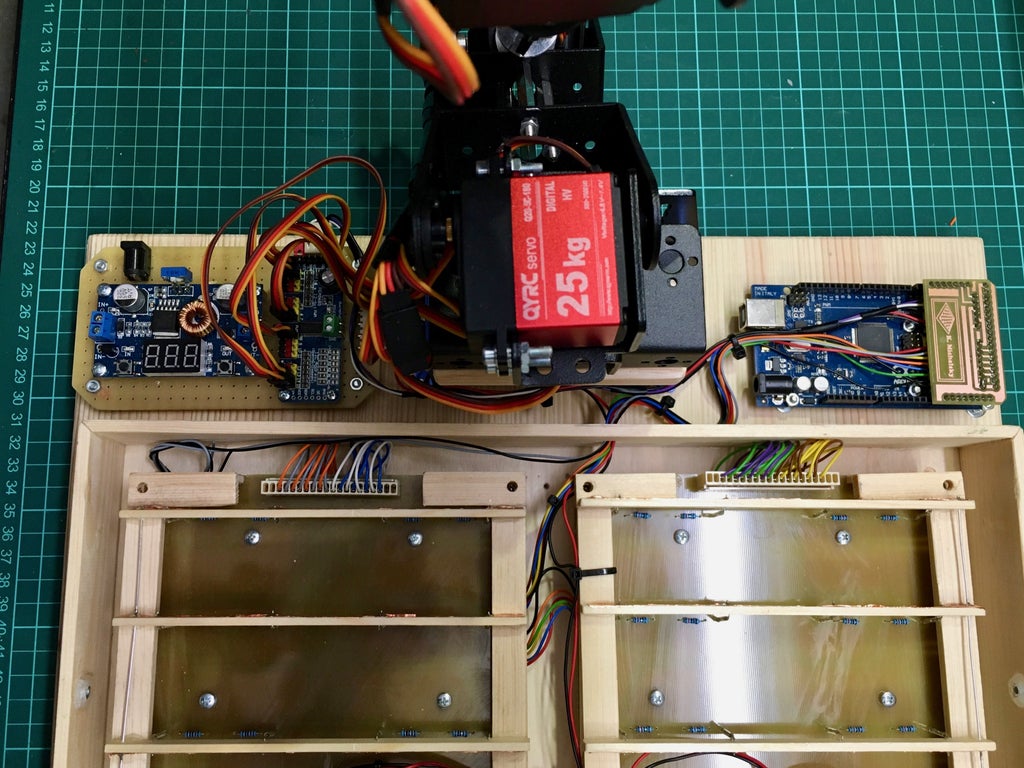
Another amazing project, created by Greg06 on Instructables, is the automated chessboard that can not only tell where specific pieces are moved but also play against an actual opponent while moving its own pieces.
Chess isn’t the only thing Arduino is capable of. Check out our homepage to learn more about how it all works, the kinds of projects you can build, and how you can get started.
The post The weird and wonderful history of chess-playing robots appeared first on Arduino Blog.