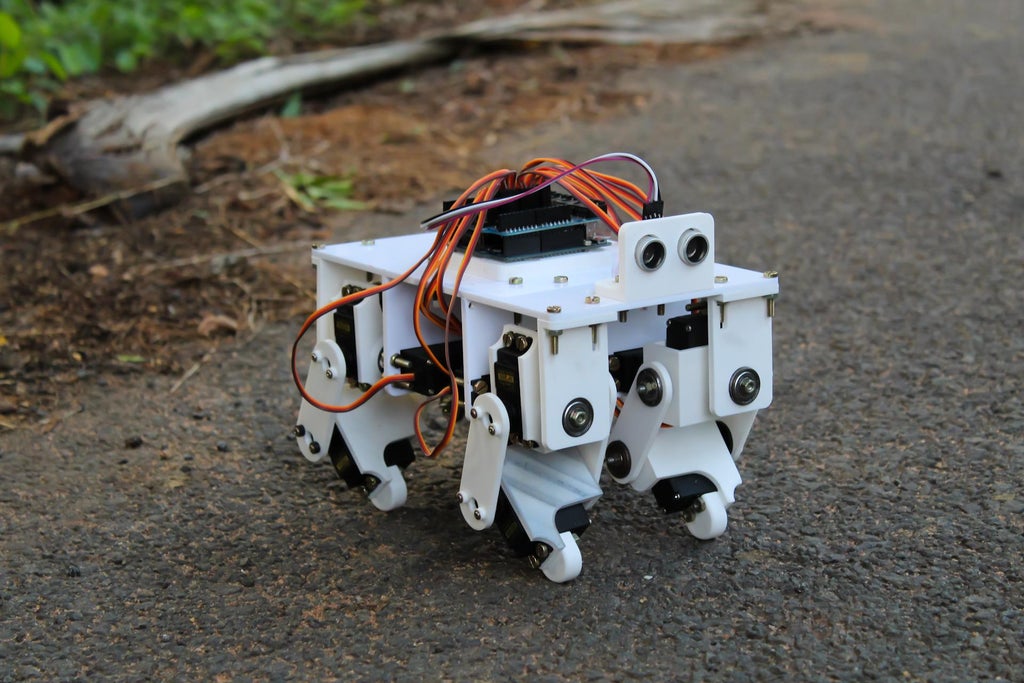
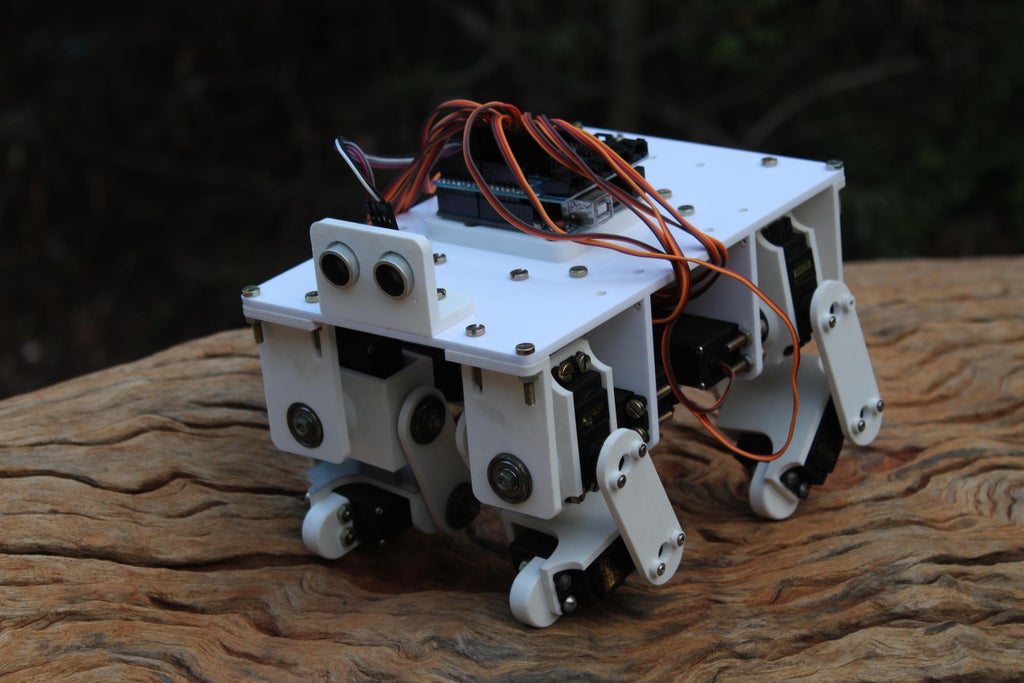
Animals like dogs, cats, raccoons, rhinoceroses, and many more get around on four legs. To help imitate this natural phenomenon, maker “Technovation” decided to create a low-cost quadruped robot using 12 servo motors and variety of 3D-printed and laser-cut parts.
Each leg features two servos that move inline with the body, as well as one arranged with its rotation axis at 90 degrees. This enables it to walk forward, scoot side-to-side, and perform a variety of twisting motions.
The robot is powered by an Arduino Uno, along with a sensor shield for easy motor connections. Inverse kinematics can be used to properly calculate servo moves, which is integrated into the device’s control sketch.
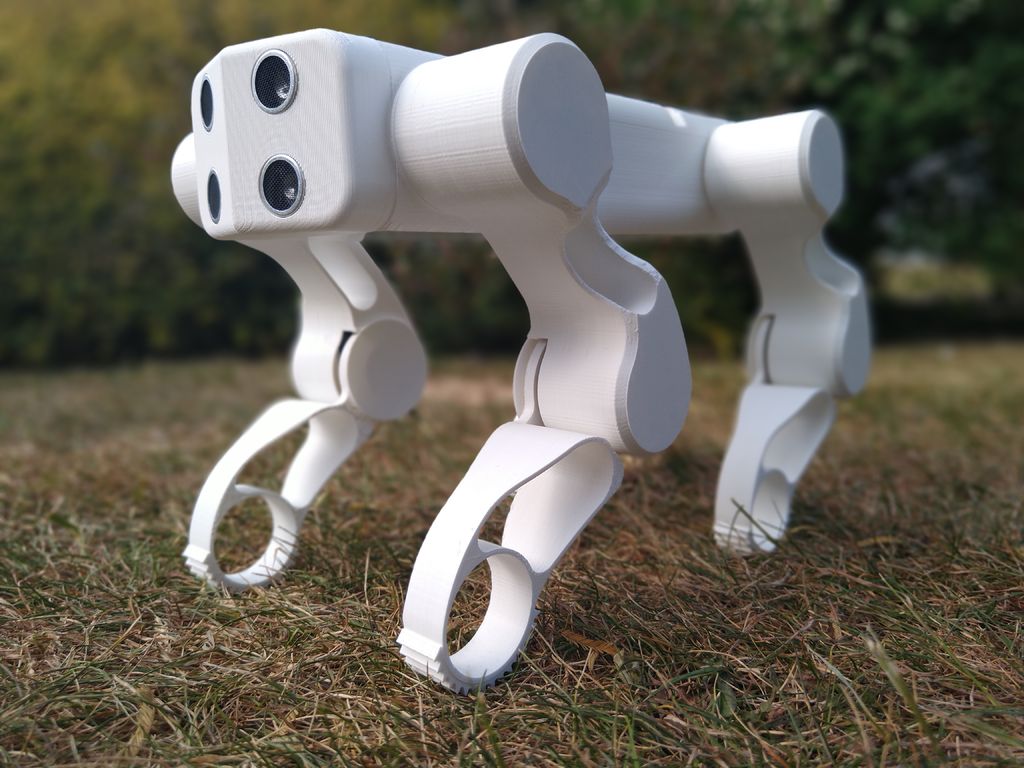
Daniel Hingston wanted to build a four-legged walking robot for several years, and with current coronavirus restrictions he finally got his chance. His 3D-printed robodog, dubbed “GoodBoy,” is reminiscent of a miniature version of Boston Dynamics’ Spot, which helped inspired the project.
It’s extremely clean, with wiring integrated into the legs mid-print. Two micro servos per leg move it in a forward direction, controlled by an Arduino Uno.
Obstacle avoidance is provided by a pair of ultrasonic sensor “eyes,” allowing it to stop when something is in its path. An LDR sensor is also implemented, which when covered by its human minder commands it to present its paw for shaking.
Be sure to check out a short demo of GoodBoy below!
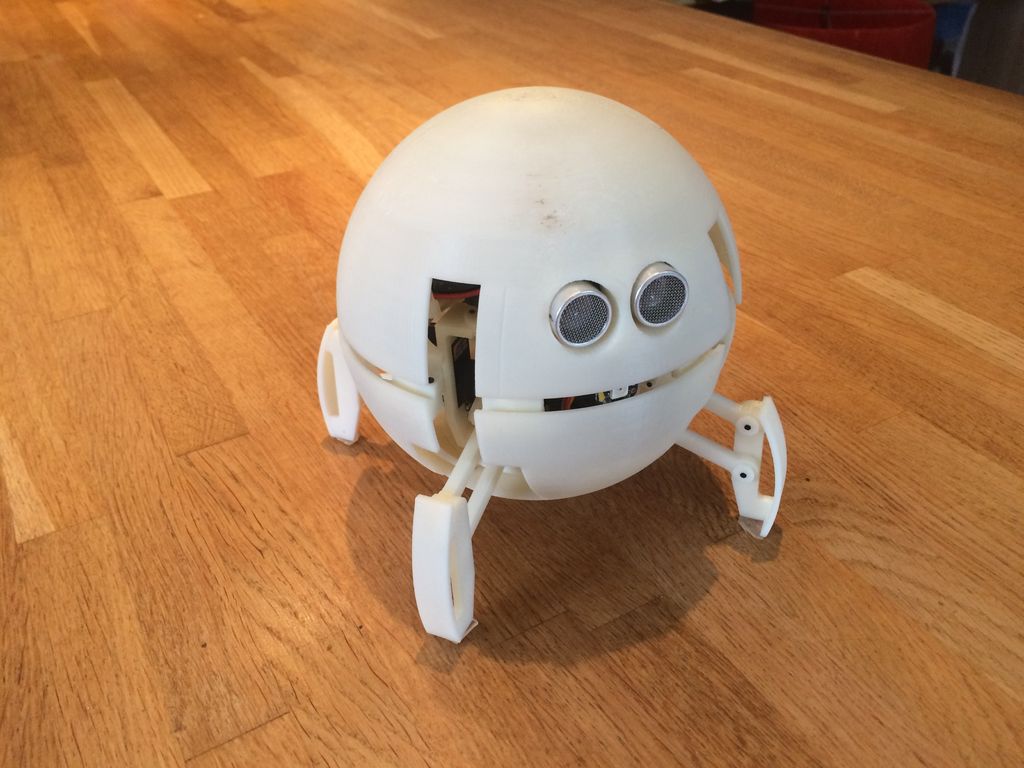
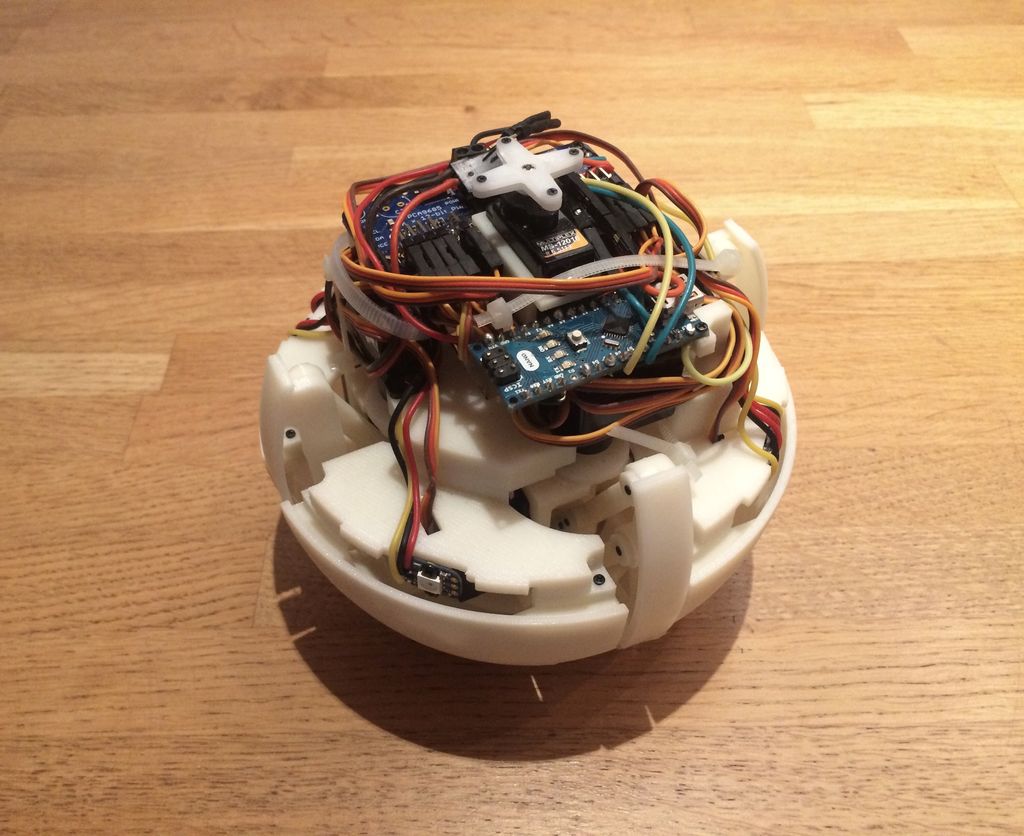
Gregory Leveque has created an adorable 3D-printed robot that not only walks on four legs, but folds up into a ball when not in use.
To accomplish this, the round quadruped utilizes one servo to deploy each leg via a parallelogram linkage system and another to move it forwards and backwards. A clever single-servo assembly is also implemented on the bottom to fill gaps left by the legs.
The device is controlled by an Arduino Nano, along with a 16-channel servo driver board. Obstacle avoidance is handled via an ultrasonic sensor, which sticks out of the top half of the sphere and rotates side to side using yet another servo.
It’s an impressive mechanical build, especially considering its diminutive size of 130mm (5.12in) in diameter.
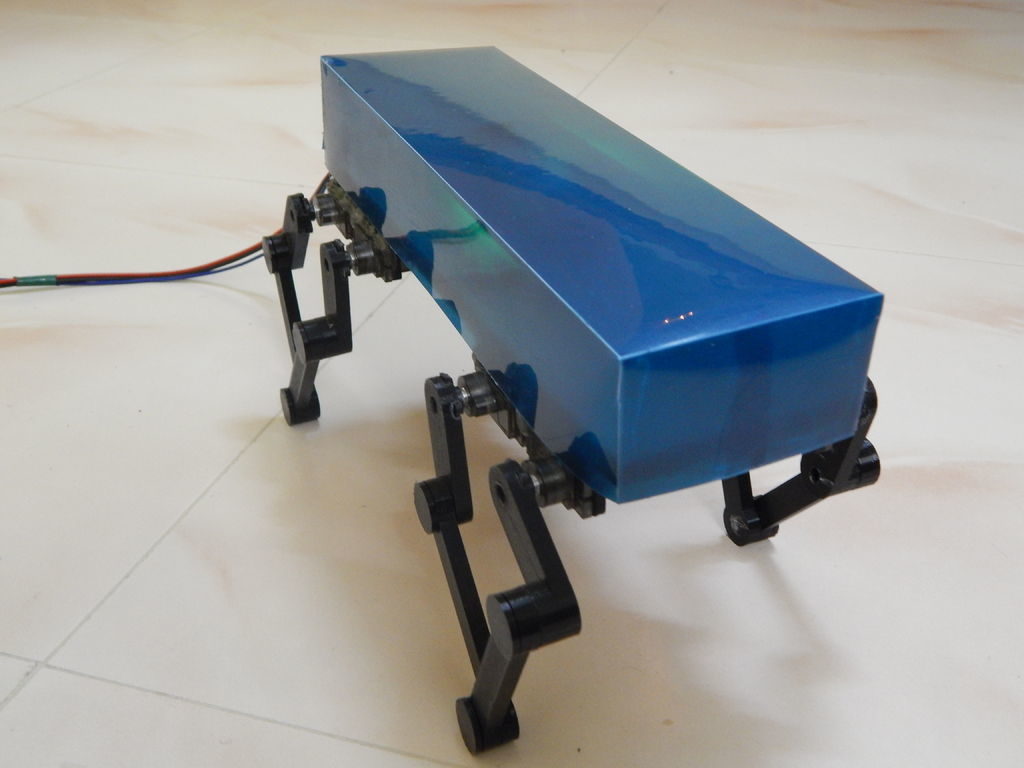
Although we can’t all have the MIT Mini Cheetah at home, Jegatheesan Soundarapandian decided to make his own version — measuring just 23 cm x 9 cm x 9 cm.
As shown in the video below, the aptly named “Baby Cheetah” does an amazing job of getting around on four legs, and is not only able to walk upright, but can even move at a crouch, turn, and tilt forwards or backwards.
The robot is equipped with eight SG90 servos to actuate each 3D-printed leg linage assembly, giving the limbs excellent mobility in a vertical plane. An Arduino Nano is used for control, while an HC-05 Bluetooth module links to a smartphone running a custom app for user interface.
If you think building a walking robot is impossible, perhaps this little guy will change your mind!
With platforms like the various flavors of Arduino, robotics has become accessible for many more people. Walking robots, however, can still be challenging. Especially when it comes to electronics and programming, one has some fairly complicated mechanisms to figure out. Perhaps none is more frustrating than four-legged walkers, as they seem very stable, but that all changes when one foot is removed from the ground.
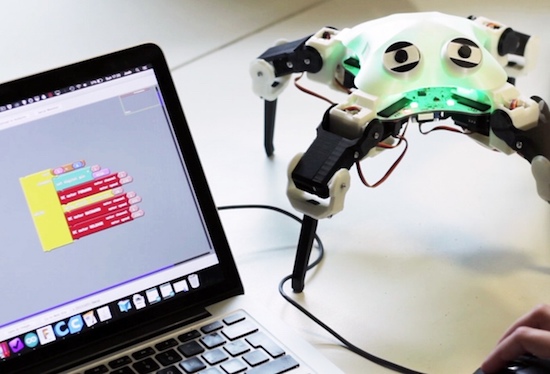
QuadBot aims to change this with an Arduino-compatible robot that, with clever cutouts for servo motors and plug-in headers on its main board, should be fairly easy to set up, yet capable of being expanded as needed.
The 3D-printable, open-source bot is designed for Makers of any skill level. It works right out of the box and can be programmed using graphical blocks, ideal for beginners. Every aspect of QuadBot can be customized and modified, though, from the 3D design down to a single line of C++ code, opening it up to more advanced users as well.
QuadBot was made for you to do real deal robotics. This means that you learn coding techniques that are scalable to bigger and better projects, rather than an oversimplified and limited alternative (such as Lego Mindstorms). A robotics platform that sets up young and experienced Makers like this has not existed until right now.
QuadBot doesn’t just walk either, it can dance, light up, and with sensors, can follow you, avoid obstacles, and even play songs. The project is the brainchild of Jack Scott-Reeve and Josh Elijah, who graduated with master’s degrees from the University of Manchester’s School of Electrical and Electronic Engineering.
If you think building a walking robot is impossible, perhaps this little guy will change your mind!
With platforms like the various flavors of Arduino, robotics has become accessible for many more people. Walking robots, however, can still be challenging. Especially when it comes to electronics and programming, one has some fairly complicated mechanisms to figure out. Perhaps none is more frustrating than four-legged walkers, as they seem very stable, but that all changes when one foot is removed from the ground.
QuadBot aims to change this with an Arduino-compatible robot that, with clever cutouts for servo motors and plug-in headers on its main board, should be fairly easy to set up, yet capable of being expanded as needed.
The 3D-printable, open-source bot is designed for Makers of any skill level. It works right out of the box and can be programmed using graphical blocks, ideal for beginners. Every aspect of QuadBot can be customized and modified, though, from the 3D design down to a single line of C++ code, opening it up to more advanced users as well.
QuadBot was made for you to do real deal robotics. This means that you learn coding techniques that are scalable to bigger and better projects, rather than an oversimplified and limited alternative (such as Lego Mindstorms). A robotics platform that sets up young and experienced Makers like this has not existed until right now.
QuadBot doesn’t just walk either, it can dance, light up, and with sensors, can follow you, avoid obstacles, and even play songs. The project is the brainchild of Jack Scott-Reeve and Josh Elijah, who graduated with master’s degrees from the University of Manchester’s School of Electrical and Electronic Engineering.
Planet Arduino is, or at the moment is wishing to become, an aggregation of public weblogs from around the world written by people who develop, play, think on Arduino platform and his son. The opinions expressed in those weblogs and hence this aggregation are those of the original authors. Entries on this page are owned by their authors. We do not edit, endorse or vouch for the contents of individual posts. For more information about Arduino please visit www.arduino.cc
You are currently browsing the archives for the Quadruped Robot category.