
07

We enjoy access to cheap stuff because of the mass market for things like mice, keyboards, and cell phones. But if you need a device that doesn’t have mass appeal, you will have to pay a lot more if you can find it at all. However, with modern techniques like 3D printing and Arduino-like microcontrollers being cheap and simple to use, you now have the option to build that special one-of-a-kind device. Case in point: [Davy’s] mouse for people who have brain or nervous system disorders. This particular device is helping a 6-year-old who can’t manipulate a normal mouse.
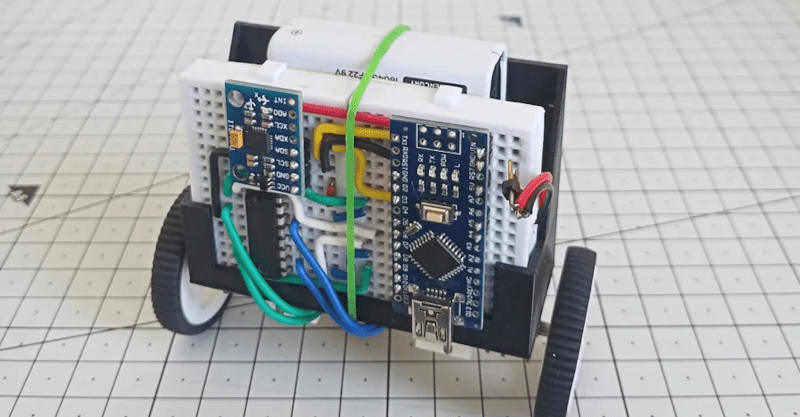
The device uses an Arduino Pro and an MPU-6050 accelerometer and gyroscope. The original design uses machined aluminum, but 3D printing should work, too. There’s something wrong with the link to the design files in the post, but it is easy to find the correct link.
If you do 3D print a similar enclosure, you might consider using heat-set threaded inserts instead of tapping the holes. They work great, are easy to install, and seem to be a bit more robust than trying to thread plastic. Then again, threaded plastic isn’t as bad as you might think.
There are, of course, many ways you could make this work, and besides, every special user will be a little different. But what a great feeling to help someone be able to do what most people take for granted.

 A delightful version of a clever one-dimensional game has been made by [Critters] which he calls
A delightful version of a clever one-dimensional game has been made by [Critters] which he calls 
