Soon after a police station opened near his house, Christopher Cooper noticed a substantial increase in the amount of emergency vehicle traffic and their associated noises even though local officials had promised that it would not be disruptive. But rather than write down every occurrence to track the volume of disturbances, he came up with a connected audio-classifying device that can automatically note the time and type of sound for later analysis.
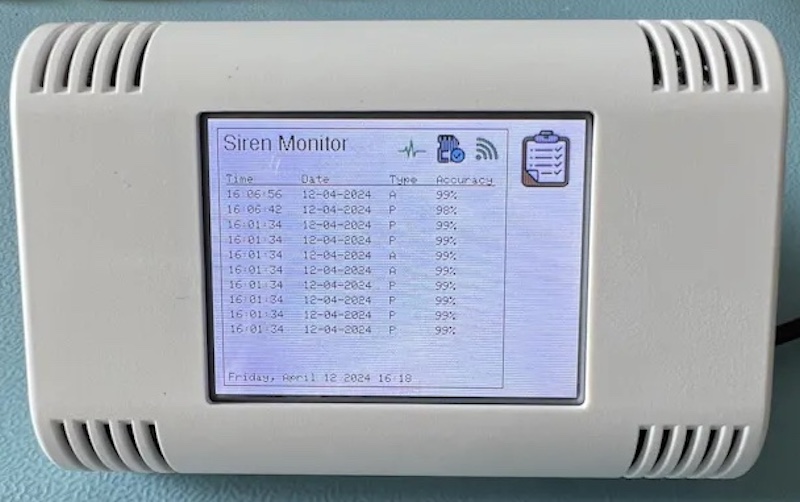
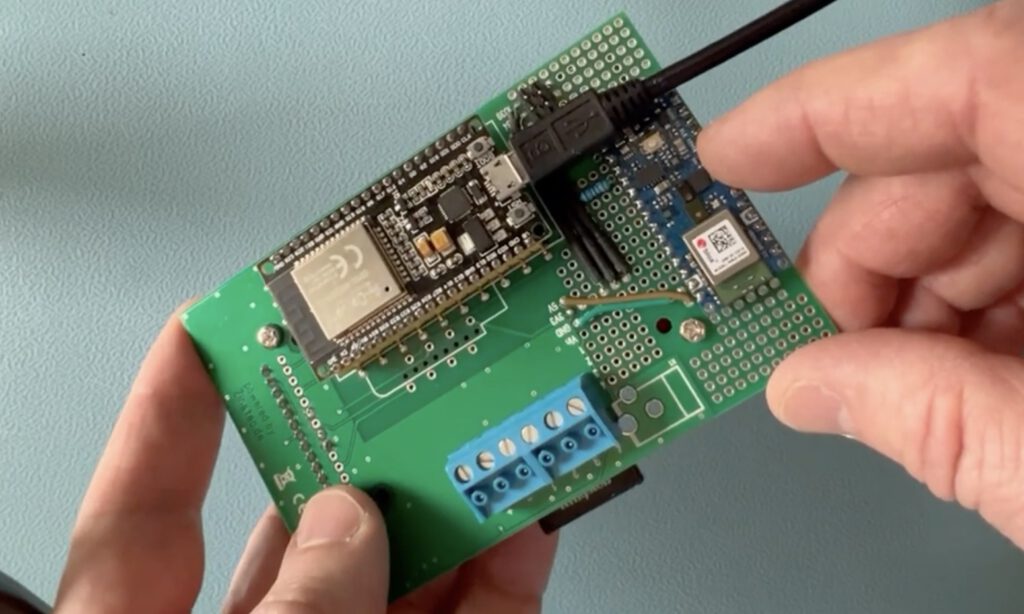
Categorizing each sound was done by leveraging Edge Impulse and an Arduino Nano 33 BLE Sense. After training a model and deploying it within a sketch, the Nano will continually listen for new noises through its onboard microphone, run an inference, and then output the label and confidence over UART serial. Reading this stream of data is an ESP32 Dev Kit, which displays every entry in a list on a useful GUI. The screen allows users to select rows, view more detailed information, and even modify the category if needed.
Going beyond the hardware aspect, Cooper’s project also includes a web server running on the ESP32 that can show the logs within a browser, and users can even connect an SD card to have automated file entries created. For more information about this project, you can read Cooper’s write-up here on Hackster.io.
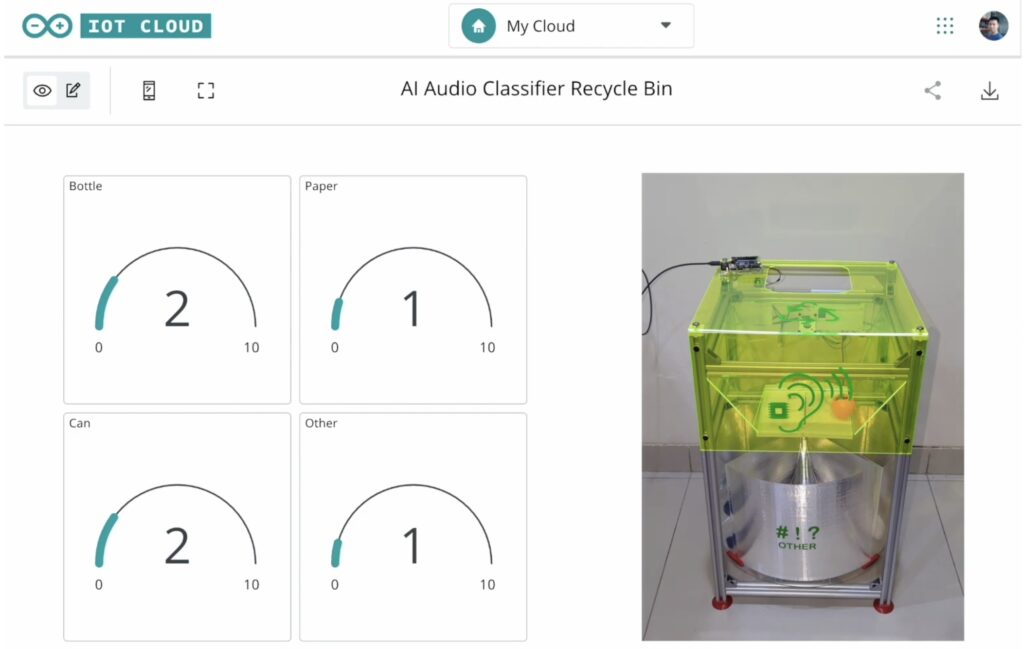
In July 2023, Samuel Alexander set out to reduce the amount of trash that gets thrown out due to poor sorting practices at the recycling bin. His original design relied on an Arduino Nano 33 BLE Sense to capture audio through its onboard microphone and then perform edge audio classification with an embedded ML model to automatically separate materials based on the sound they make when tossed inside. But in this latest iteration, Alexander added several large improvements to help the concept scale much further.
Perhaps the most substantial modification, the bin now uses an Arduino Pro Portenta C33 in combination with an external Nicla Voice or Nano 33 BLE Sense to not only perform inferences to sort trash, but also send real-time data to a cloud endpoint. By utilizing the Arduino Cloud through the Portanta C33, each AI-enabled recycling bin can now report its current capacity for each type of waste and then send an alert when collection must occur.
Thanks to these upgrades, Alexander was able to submit his prototype for consideration in the 2023 Hackaday Prize competition where he was awarded the Protolabs manufacturing grant. To see more about this innovative project, you can check out its write-up here and watch Alexander’s detailed explanation video below.
In the past, DIY tech enthusiasts faced limitations when it came to creating small and intricate projects. However, the introduction of technologies like MicroPython and tiny microcontroller boards such as the Arduino Nano revolutionized the field. This enabled makers to build genuinely projects like wearables, miniature robotics, and ultra-thin gadgets, ushering in a new era of innovation. In this article, we’ll explore MicroPython, its utility, the capabilities of the Arduino Nano family, and showcase some shrunken-down project examples.
What is MicroPython (and why does it matter)?
The Python programming language dates back to 1991, and is one of the most widely-known and used languages out there.
In 2014, a more lightweight version of Python was released, with the goal of being run on microcontrollers and other small systems. Thus, MicroPython was born and a new era of engineering began.
What does MicroPython bring to the table? Let’s take a look at some of the advantages:
It’s simple, allowing developers to write code in the famously accessible Python language.
It’s designed for small-scale projects and is able to operate with limited resources.
It’s versatile, and has the ability to work across a range of different microcontroller platforms.
It’s been used, successfully, in countless projects including Internet of Things devices, robotics, sensors and much more.
Understanding Nano boards
Now let’s look at the second ingredient in creating amazing, tiny projects — Nano boards. Developed by Arduino, these boards consist of a microcontroller unit, input and output pins, and components like LEDs and sensors.
Here’s what they offer:
A compact design, making them perfect for projects where space is a key concern.
A range of digital and analog input/output pins that can be easily programmed for more versatility.
They’re cost-effective and easy to find.
Why small projects matter in tech
Do the best things actually come in small packages? Not always, but in the world of tech, this rings pretty true a lot of the time.
While big, grand creations are valuable too, smaller-sized projects have an incredibly useful role to play. Let’s take a look at why fun-sized designs are so important.
Space efficiency: Unlike their bigger counterparts, physically small projects don’t require much space, making them ideal for use in more compact environments like homes, or where more discrete and unobtrusive solutions are required — for example an automated hearing aid.
Expandable: Smaller projects are more modular — you can start with one piece and then add new parts as you go, based on your needs and new ideas.
Accessible: Small projects are simpler to start and cheaper to build, making them great choices for beginners or people with limited resources or financial constraints. They’re a great gateway to the world of home automation and DIY tech.
Customizable: Smaller projects are easy to tweak and adapt, making them more suited to customisation. This lets you build projects in exactly the way you desire and amend them over time.
Prototyping potential: Smaller hardware projects make great prototypes for bigger and more resource-heavy work. They enable you to experiment with different hardware components and concepts on a cheaper and lower-stakes scale before committing to a big, expensive project.
Compatibility with bigger systems: Platforms like Arduino’s Nano boards and MicroPython tend to be highly compatible with larger systems like home automation networks. This makes it effortless to integrate your smaller projects into your overall setup.
Lower power consumption: Thanks to their size, small-scale projects tend not to use up huge amounts of power, and are often built with energy efficiency in mind. This is not only good for the planet, but it also means your smaller projects can run for extended periods of time without the need for constant recharging.
Using Arduino with MicroPython
Now we have some idea of why small projects are so significant, let’s talk about how to start making them with Arduino and MicroPython.
If you remember, one of the great things about MicroPython is its simplicity — you don’t need to be a tech prodigy to learn the basics and start tinkering around with this language. It’s also highly established and there are a ton of resources and documentation for using this language across a number of different boards.
It’s imperative to keep in mind that programming an Arduino board with MicroPython is a very different process to using the Arduino IDE.
Here’s a quick guide to getting started with MicroPython on an Arduino board:
1. Install MicroPython on your Arduino board, and then load a Python script — called a script.py.
2. Download the Arduino Lab for MicroPython. This is a lightweight editor built to enable interaction between your computer and your Arduino board. It allows you to perform tasks like selecting a port and loading scripts.
3. Download the OpenMV editor. This platform enables you to program Arduino boards using a fork of the MicroPython language. The editor lets you upload scripts directly to the board and get started with your very first projects.
Arduino examples
There are currently five Arduino boards that officially support MicroPython:
For a smart maker with imagination, the possibilities are almost endless here. Let’s explore a couple examples of small but spectacular Arduino projects brought to life with MicroPython.
Pico-Kubik quadruped robot
Big robots are so last century.
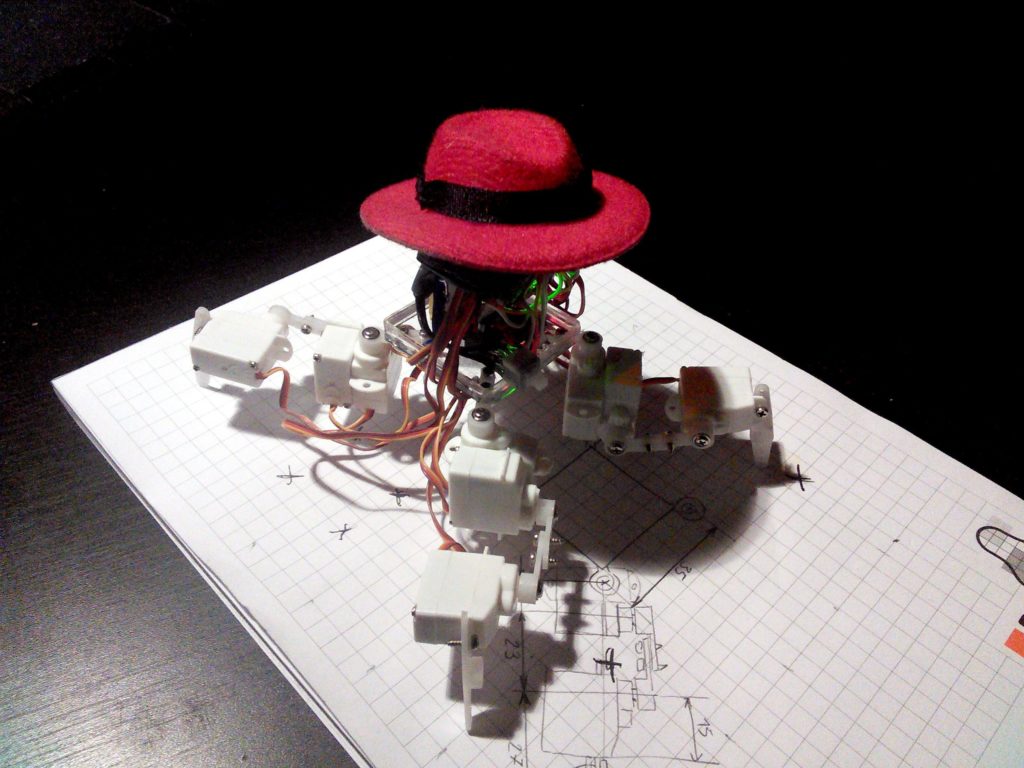
These days, the really cool kids are building tiny robots. Like this one, the Pico-Kubik robot built by Radomir Dopieralski.
It’s the latest in a line of quadruped robots, and this one is small enough to fit in the palm of your hand. One of the two versions runs MicroPython, and even carries its own webcam.
InkPlate 10
With the right tools, it’s possible to build projects that are literally paper-thin.
Enter the InkPlate 10 — a 25cm ePaper display that can be programmed using Arduino and MicroPython. It’s a razor-thin tablet that can be easily programmed, and is made from recycled kindles and similar tech. It’s also available at a very wallet-friendly price point.
The future of tiny tech
As time goes on, we’ll be able to build smaller and smaller projects. This means the future for tiny tech is truly exciting, with some fascinating potential use cases on the horizon. Here’s a glimpse at some things to look forward to here:
AI integration: As small hardware becomes capable of running lightweight AI models, we could see the emergence of new functions like tiny smart cameras with object recognition.
Low-power designs, with tiny tech projects using increasingly sustainable resources: The ability to run for longer and use renewable energy sources and battery technology will allow for more efficient and eco-friendly designs.
Even smaller projects: As the technology around Nano boards and programming continues to develop, it’ll be possible to create smaller and smaller projects, opening the doors to even more possibilities in areas like wearables and healthcare devices.
Better connectivity: Small projects will be able to use technologies like 5G and Wi-Fi 6 more easily and smoothly, allowing for more versatile applications like remote control and use in IoT networks.
Open-source communities: As open-source communities for hardware and software continue to grow and develop, we’ll see even more shared knowledge and libraries of open-source code aimed at helping developers and makers create their own tiny projects.
More diverse uses for tiny tech: In the future, we could see even wider applications for this kind of technology, from wearable health monitors and highly precise farming sensors to new ways of monitoring the environment.
A greater focus on security: As tiny tech becomes more common, it’ll also become more of a target for hackers. This will prompt a push to take security more seriously here, driving more sophisticated and smart approaches to device safety.
Embrace tiny tech with Arduino
The future for tiny tech projects is truly exciting. Today’s makers and tech enthusiasts have access to a wealth of tools, techniques, and learning resources that is growing rapidly, all the time.
At Arduino, our Project Hub is filled with examples of smaller projects. Our Nano boards give you the tools to break through new frontiers of creativity and innovation, taking your smart home and DIY projects to the next level.
Contact us to learn more about Nano boards and Arduino in general, and get started today.
For well over one hundred years, people have been constructing machines that dispense fortunes to those who ask at the insertion of a coin and the push of a button. In modern days, this has taken the form of mobile apps that can be far more expansive, albeit with a lack of physical interaction. Seeing an opportunity to use an embedded speech recognition model in this kind of application, the Electronic Cats team built the aptly named Fortune Cat just in time for some Halloween fun.
This small device, based on the Arduino Nano 33 BLE Sense, takes advantage of the onboard microphone to listen for words being spoken at the small cube. Performing the language processing is Cyberon’s Arduino Speech Recognition Engine, which was configured to listen for the wake phrase “Fortune Cat” and then later respond to “tell me my future” as its command phrase. After generating the model online, it was incorporated into the code via the DSpotter software development kit that lets the program check if either the wake or action phrase has been said and then act accordingly.
In this case, asking Fortune Cat for your future will present one of 20 random phrases that get displayed on the OLED mounted to the top of the 3D-printed enclosure. To read more about how the Electronic Cats crew created and configured Fortune Cat, you can check out their write-up here on Hackster.io or watch their video below!
When dealing with indoor climate controls, there are several variables to consider, such as the outside weather, people’s tolerance to hot or cold temperatures, and the desired level of energy savings. Windows can make this extra challenging, as they let in large amounts of light/heat and can create poorly insulated regions, which is why Jallson Suryo developed a prototype that aims to balance these needs automatically through edge AI techniques.
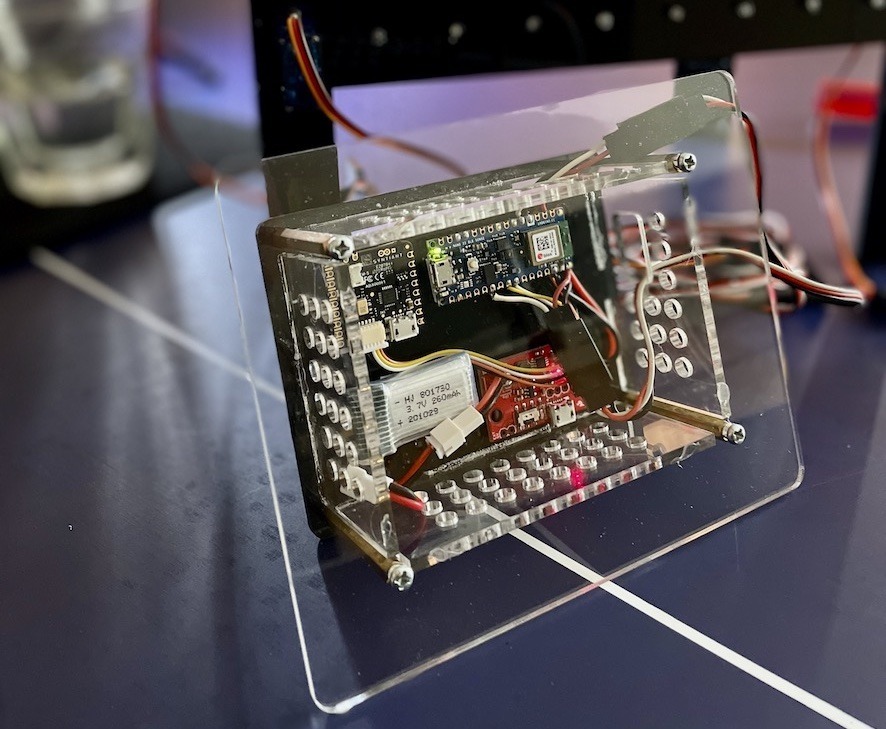
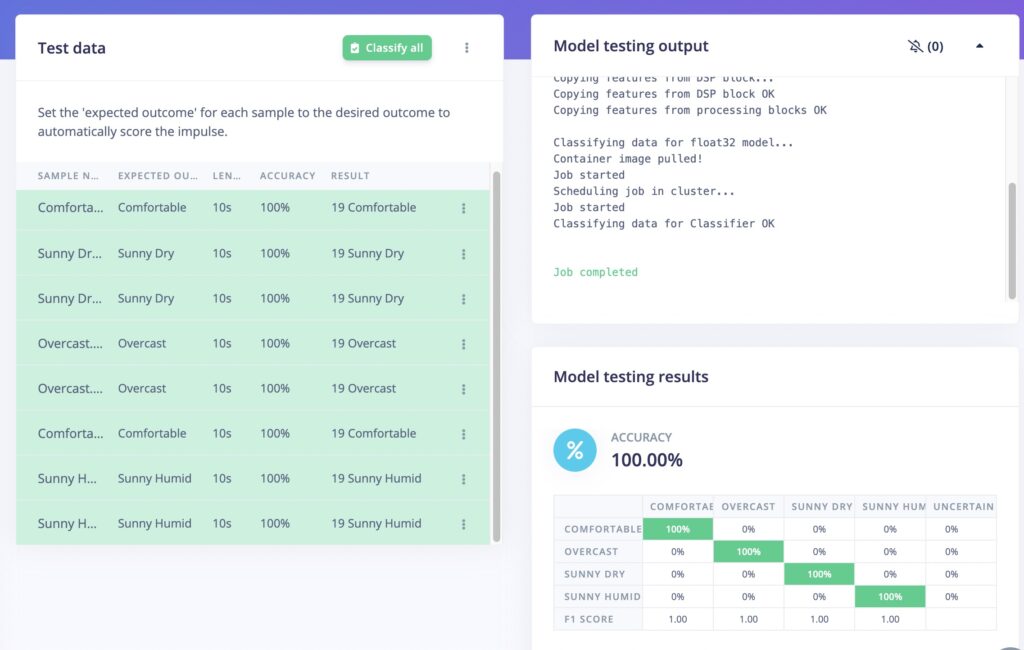
Suryo’s smart building ventilation system utilizes two separate boards, with an Arduino Nano 33 BLE Sense handling environmental sensor fusion and a Nicla Voice listening for certain ambient sounds. Rain and thunder noises were uploaded from an existing dataset, split and labeled accordingly, and then used to train a Syntiant audio classification model for the Nicla Voice’s NDP120 processor. Meanwhile, weather and ambient light data was gathered using the Nano’s onboard sensors and combined into time-series samples with labels for sunny/cloudy, humid, comfortable, and dry conditions.
After deploying the board’s respective classification models, Suryo added some additional code that writes new I2C data from the Nicla Voice to the Nano that indicates if rain/thunderstorm sounds are present. If they are, the Nano can automatically close the window via servo motors while other environmental factors can set the position of the blinds. With this multi-sensor technique, a higher level of accuracy can be achieved for more precision control over a building’s windows, and thus attempt to lower the HVAC costs.
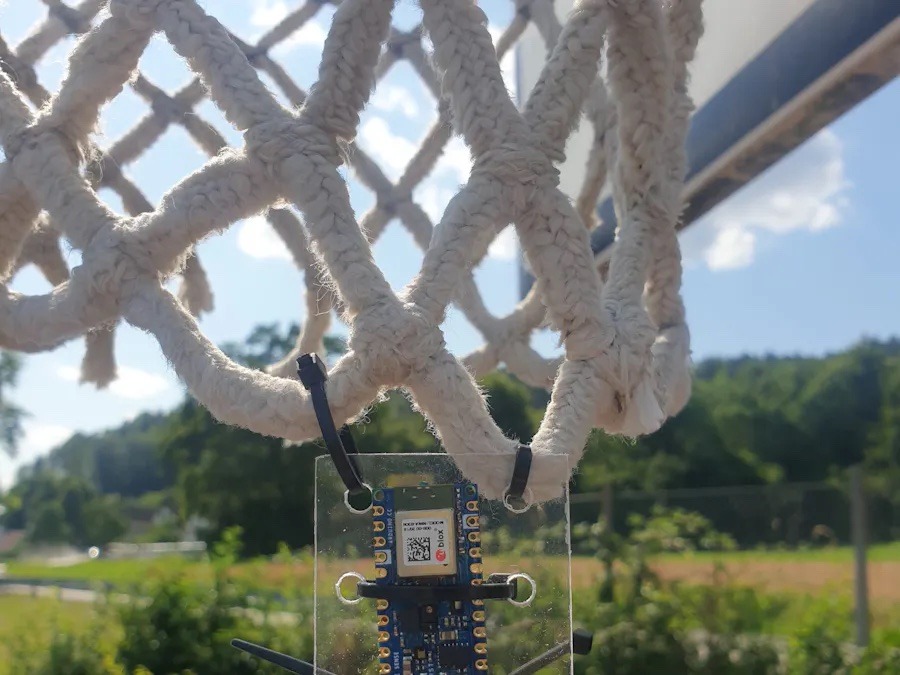
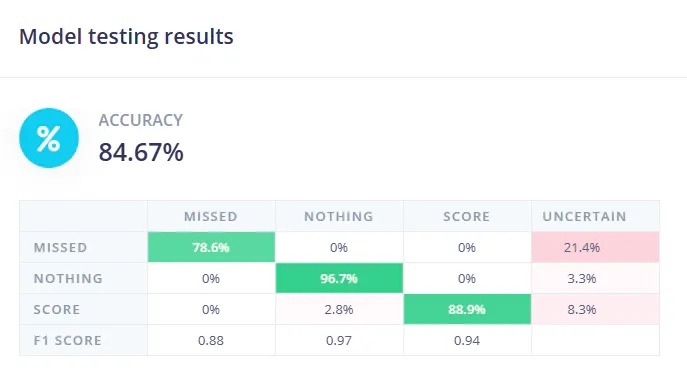
When playing a short game of basketball, few people enjoy having to consciously track their number of successful throws. Yet when it comes to automation, nearly all systems rely on infrared or visual proximity detection as a way to determine when a shot has gone through the basket versus missed. This is what inspired one team from the University of Ljubljan to create a small edge ML-powered device that can be suspended from the net with a pair of zip ties for real-time scorekeeping.
After collecting a total of 137 accelerometer samples via an Arduino Nano 33 BLE Sense and labeling them as either a miss, a score, or nothing within the Edge Impulse Studio, the team trained a classification model and reached an accuracy of 84.6% on real-world test data. Getting the classification results from the device to somewhere readable is handled by the Nano’s onboard BLE server. It provides two services, with the first for reporting the current battery level and the second for sending score data.
Once the firmware had been deployed, the last step involved building a mobile application to view the relevant information. The app allows users to connect to the basketball scoring device, check if any new data has been received, and then parse/display the new values onscreen.
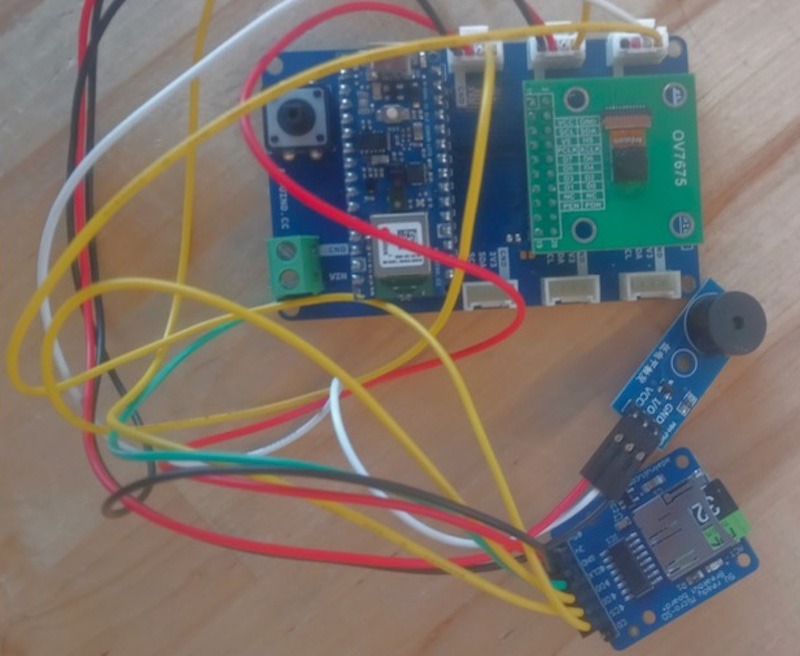
Although a large percentage of our trash can be recycled, only a small percentage actually makes it to the proper facility due, in part, to being improperly sorted. So as an effort to help keep more of our trash out of landfills without the need for extra work, Samuel Alexander built a smart recycling bin that relies on machine learning to automatically classify the waste being thrown in and sort it into separate internal compartments.
Because the bin must know what trash is being tossed in, Alexander began this project by first constructing a minimal rig with an Arduino Nano 33 BLE Sense to capture sounds and send them to an Edge Impulse project. From here, the samples were split into 60 one-second samples for each rubbish type, including cans, paper, bottles, and random background noise. The model, once trained, was then deployed to the Nano as a custom Arduino library.
With the board now able to determine what type of garbage has been thrown in, Alexander got to work on the remaining portions of the smart bin. The base received a stepper motor which spins the four compartments to line up with a servo-actuated trap door while a LiPo battery pack provides power to everything for fully wireless operation.
To read more about how this bin was created, you can visit Alexander’s write-up here on Hackaday.io.
Health tracking is a vital component to recovering after an injury or simply trying to improve one’s own fitness, and although accelerometer-based devices are decent at tracking general activity, they fail to accurately monitor specific areas of the body such as joint movement. This is why a team of researchers from the Singapore University of Technology and Design (SUTD) along with members of SingHealth Polyclinics designed a knitted wearable sensor for use on the knee.
Based on conductive fabric technology, the device utilizes a stitched pattern of conductive threads that change their resistance depending on the extent to which they are stretched. Once added to the garment, the team created a small pocket for storing an Arduino Nano 33 BLE Sense board whose job it is to continuously measure the voltage in the fabric via its ADC and output the results over Bluetooth® Low Energy with a response time of a mere 90 milliseconds.
Through their experiments of making subjects walk, jog, and climb stairs, the researchers were able to compare the electrical signals to actual joint movement in order to correlate the two and calibrate the sensor to translate voltages into degrees of motion. Because of the device having a resolution of just 0.12 degrees, it showed to be a promising candidate as both an effective activity tracker and a comfortable garment that can be worn for extended periods of time.
With an array of onboard sensors, Bluetooth® Low Energy connectivity, and the ability to perform edge AI tasks thanks to its nRF52840 SoC, the Arduino Nano 33 BLE Sense is a great choice for a wide variety of embedded applications. Further demonstrating this point, a group of students from the Introduction to Embedded Deep Learning course at Carnegie Mellon University have published the culmination of their studies through 10 excellent projects that each use the Tiny Machine Learning Kit and Edge Impulse ML platform.
Wrist-based human activity recognition
Traditional human activity tracking has relied on the use of smartwatches and phones to recognize certain exercises based on IMU data. However, few have achieved both continuous and low-power operation, which is why Omkar Savkur, Nicholas Toldalagi, and Kevin Xie explored training an embedded model on combined accelerometer and microphone data to distinguish between handwashing, brushing one’s teeth, and idling. Their project continuously runs inferencing on incoming data and then displays the action on both a screen and via two LEDs.
Categorizing trash with sound
In some circumstances, such as smart cities or home recycling, knowing what types of materials are being thrown away can provide a valuable datapoint for waste management systems. Students Jacky Wang and Gordonson Yan created their project, called SBTrashCat, to recognize trash types by the sounds they make when being thrown into a bin. Currently, the model can three different kinds, along with background noise and human voices to eliminate false positives.
Distributed edge machine learning
The abundance of Internet of Things (IoT) devices has meant an explosion of computational power and the amount of data needing to be processed before it can become useful. Because a single low-cost edge device does not possess enough power on its own for some tasks, Jong-Ik Park, Chad Taylor, and Anudeep Bolimera have designed a system where each device runs its own “slice” of an embedded model in order to make better use of available resources.
Predictive maintenance for electric motors
Motors within an industrial setting require constant smooth and efficient operation in order to ensure consistent uptime, and recognizing when one is failing often necessitates manual inspection before a problem can be discovered. By taking advantage of deep learning techniques and an IMU/camera combination, Abhishek Basrithaya and Yuyang Xu developed a project that could accurately identify motor failure at the edge.
Estimating inventory in real-time with computer vision
Warehouses greatly rely on having up-to-date information about the locations of products, inventory counts, and incoming/outgoing items. From these constraints, Netra Trivedi, Rishi Pachipulusu, and Cathy Tungyun collaborated to gather a dataset of 221 images labeled with the percentage of space remaining on the shelf. This enables the Nano 33 BLE Sense to use an attached camera to calculate empty shelf space in real-time.
Dog movement tracking
Fitness trackers such as the FitBit and Apple Watch have revolutionized personal health tracking, but what about our pets? Ajith Potluri, Eion Tyacke, and Parker Crain addressed this hole in the market by building a dog collar that uses the Nano’s IMU to recognize daily activities and send the results to a smartphone via Bluetooth. This means the dog’s owner has the ability to get an overview of their pet’s day-to-day activity levels across weeks or months.
Intelligent bird feeding system
Owners of backyards everywhere encounter the same problem: “How do I keep the squirrels away from a birdfeeder while also allowing birds?” Eric Wu, Harry Rosmann, and Blaine Huey worked together on a Nano 33 BLE Sense-based system that employs a camera module to identify if the animal at the feeder is a bird or a squirrel. If it is the latter, an alarm is played from a buzzer. Otherwise, the bird’s species is determined through another model and an image is saved to an SD card for future viewing.
Improving one’s exercise form
Exercise, while being essential to a healthy lifestyle, must also be done correctly in order to avoid accidental injuries or chronic pain later on, and maintain proper form is an easy way to facilitate this. By using both computer vision on an NVIDIA Jetson Nano and anomaly detection via an IMU on a Nano 33 BLE Sense, Addesh Bhargava, Varun Jain, and Rohan Paranjape built a project that was more accurate than typical approaches to squatting form detection.
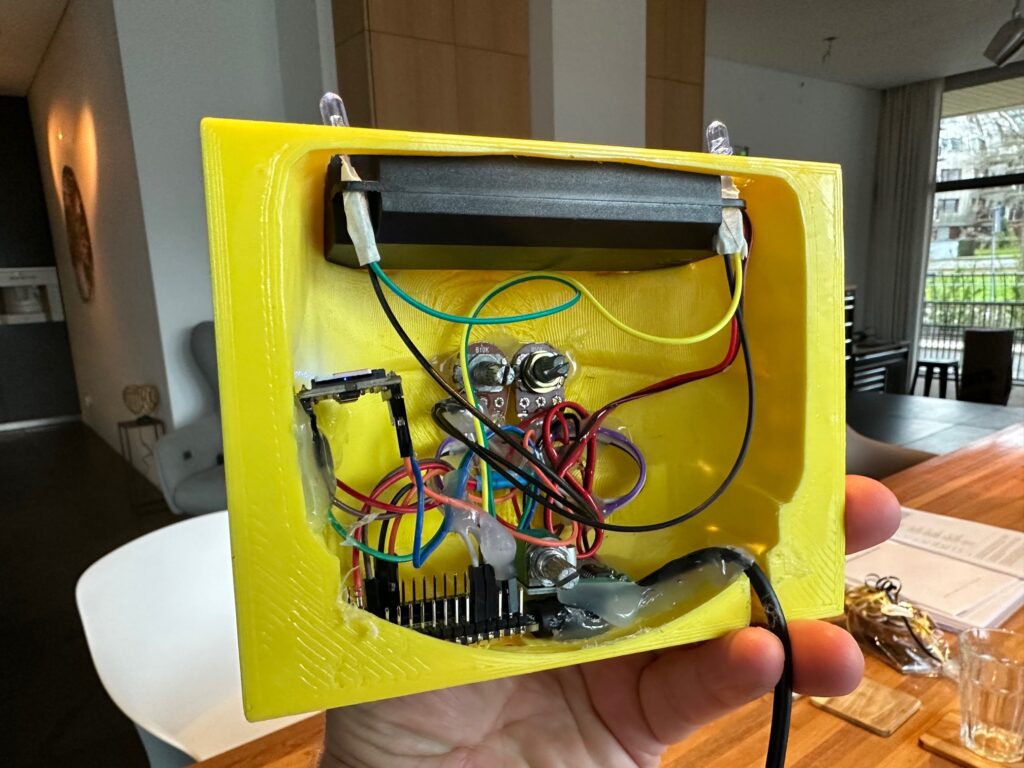
Whether it is a library, conference room, school classroom, or some other public space, we all require peace and quiet to work sometimes, but achieving it can be a challenge. After wondering if loudmouths could be automatically asked to be silent via some kind of sensor-driven system, Bas op ten Berg, the founder of BotBerg, chose to build one using just a few components.
His smart shusher is based on the Arduino Nano 33 BLE Sense board and its built-in MP34DT05 MEMS microphone element. By reading in the pulse-density modulation (PDM) value from the output pin, he could easily convert it into the sound pressure, and thus the ambient noise level. Setting the noise threshold is done by carefully adjusting a connected potentiometer that gets read multiple times per second from an analog input pin. When the set threshold has been exceeded for a predetermined amount of time, a DFRobot MP3 player module is triggered and plays a sound file containing the phrase “Pssst, silence please! Silence please!” which is sure to grab anyone’s interest. All of the parts are housed within an equally attention-grabbing 3D printed lower face so that it appears to be speaking.
Beyond this local, offline functionality, op ten Berg offers other ways to expand the project, including ideas such as BLE connectivity, extra sounds/lights, or even switching on a relay. More details can be found on his website.
Planet Arduino is, or at the moment is wishing to become, an aggregation of public weblogs from around the world written by people who develop, play, think on Arduino platform and his son. The opinions expressed in those weblogs and hence this aggregation are those of the original authors. Entries on this page are owned by their authors. We do not edit, endorse or vouch for the contents of individual posts. For more information about Arduino please visit www.arduino.cc
You are currently browsing the archives for the Nano 33 BLE Sense category.