05
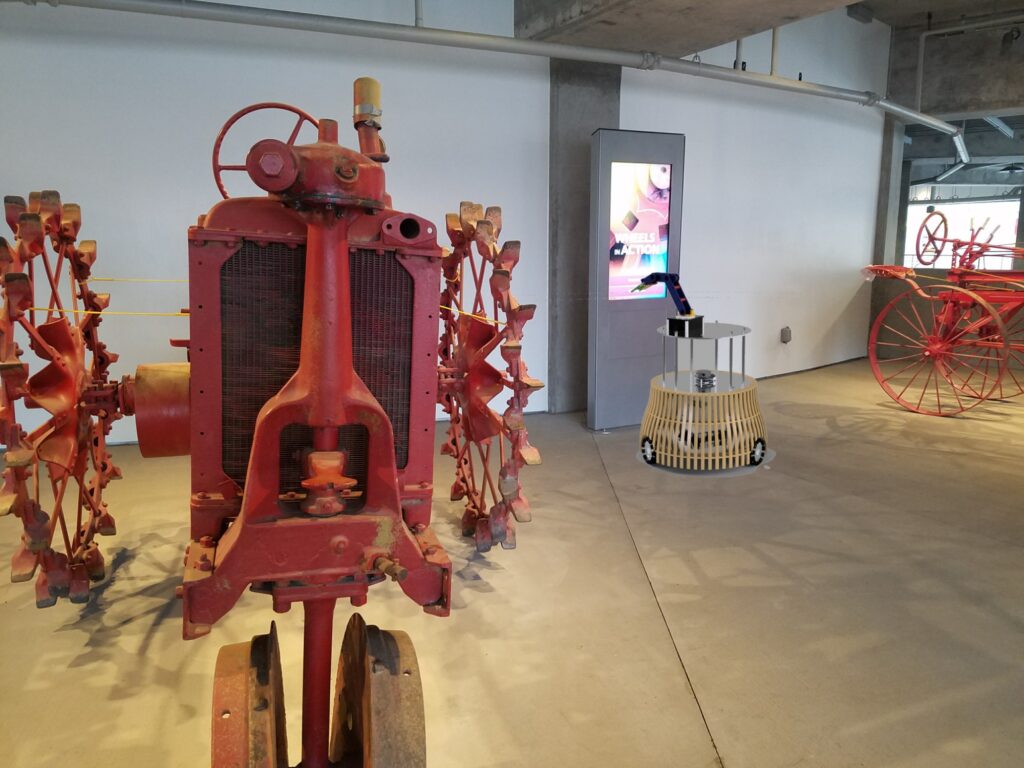
Museums allow people to explore topics in history, science, and much more through the use of exhibits that are often comprised of screens or some other interactive medium. Staff are given the role of visiting each one periodically and checking to see if they still work correctly as well as guide visitors around the area, thus taking them away from other tasks. To solve this problem, a pair from EDM Studio in Vancouver (Will Donaldson and Darran Edmundson) wanted to build an autonomous telepresence robotic platform, called “OMNi,” which could do both on its own.
The system they came up with relies on a set of three omni wheels placed in a triangle formation around a circular base plate for creating precise movements. Positional feedback is gathered by measuring the motors’ RPM with a closed-loop PID controller/Arduino Nano combination and sending that information via I2C to a central Raspberry Pi 4. There is also a small LIDAR module on the robot that gathers point-cloud data and constructs a digital map for autonomous navigation and positioning.
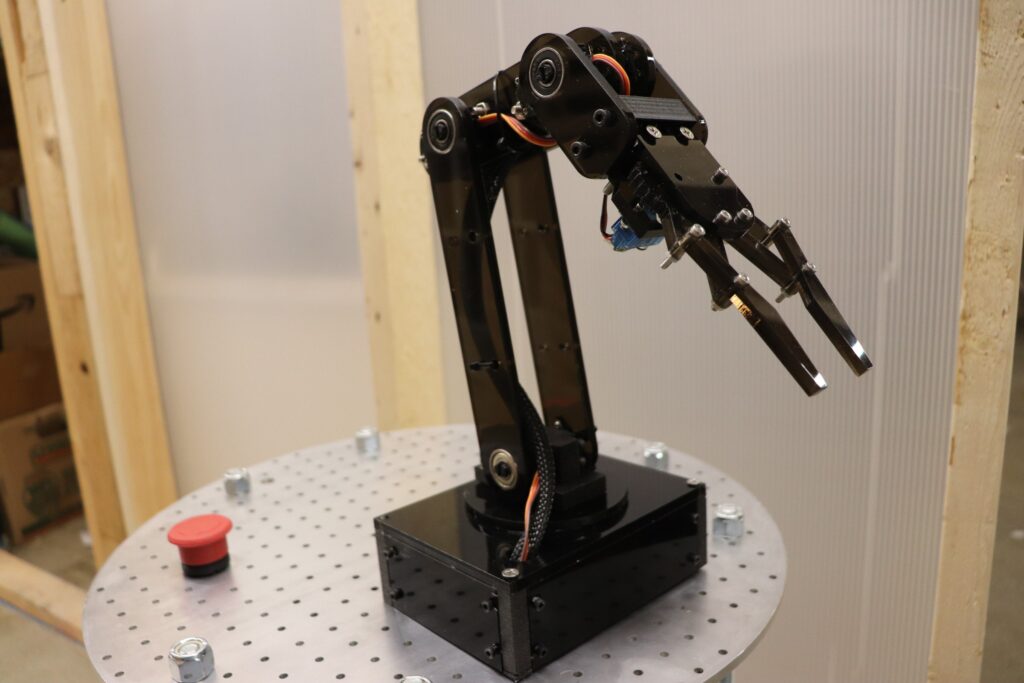
OMNi was designed with modularity and expandability in mind, which is why the top plate has an ample number of holes drilled into it for attaching certain accessories. One of these is a robotic gripper that utilizes servo motors to grab objects or touch a screen.
To read more about how OMNi was constructed and used in a museum setting, you can read the Donaldson and Edmundson’s writeup here on Hackaday.io.
The post OMNi is a modular, omnidirectional robot for museum duties appeared first on Arduino Blog.