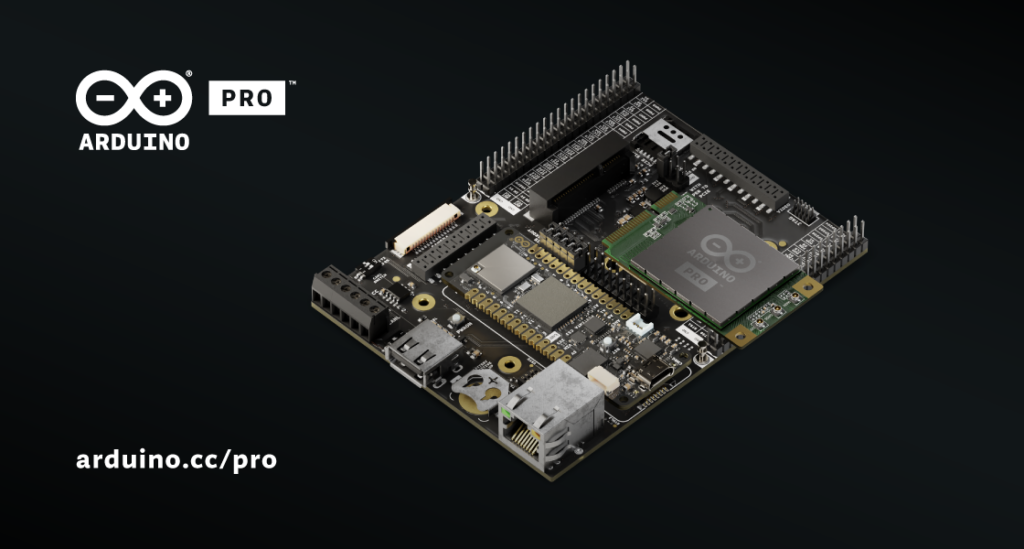
Our team at Embedded World (April 9th-11th in Nuremberg) has announced not one, but two groundbreaking additions to the Arduino Pro range that are ready to elevate your prototyping and connectivity experiences. Say hello to the Arduino Portenta Mid Carrier and the Arduino Pro 4G Module!
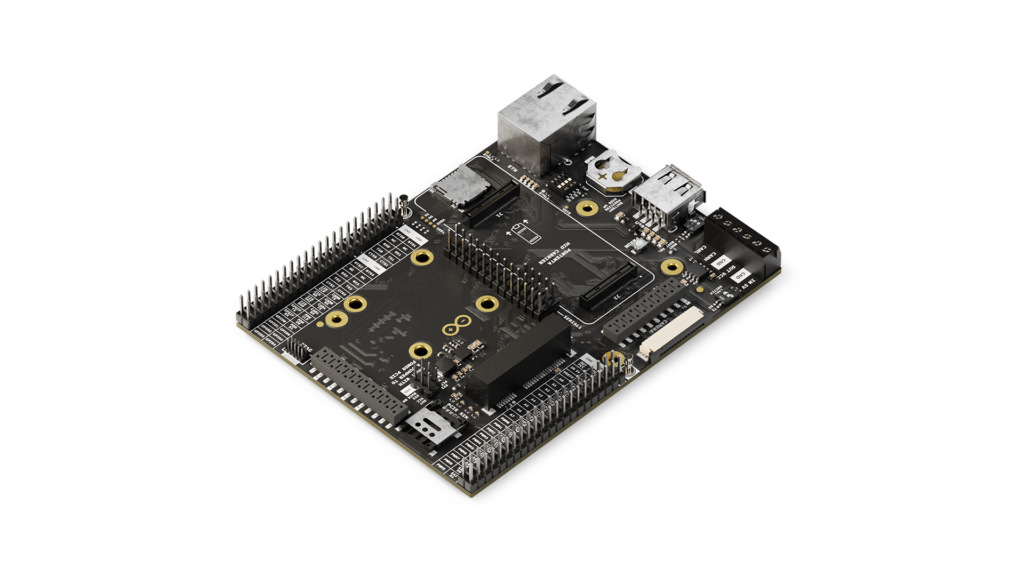
This ultimate companion to the Portenta boards family is your gateway to seamless prototyping and expanded connectivity, designed to grant you zero hassles and maximum efficiency.
From CAN lines to Ethernet, microSD, USB, camera interfaces, and more, it allows you to effortlessly tap into high-density signals through dedicated headers. Plus, debug pins and the RTC battery backup will simplify your development journey even more.
Compatible with Portenta C33, Portenta H7, and Portenta X8, it adapts to your evolving development needs with ease. Whether you’re delving into machine vision prototyping or testing cellular connectivity, this is the carrier for you.
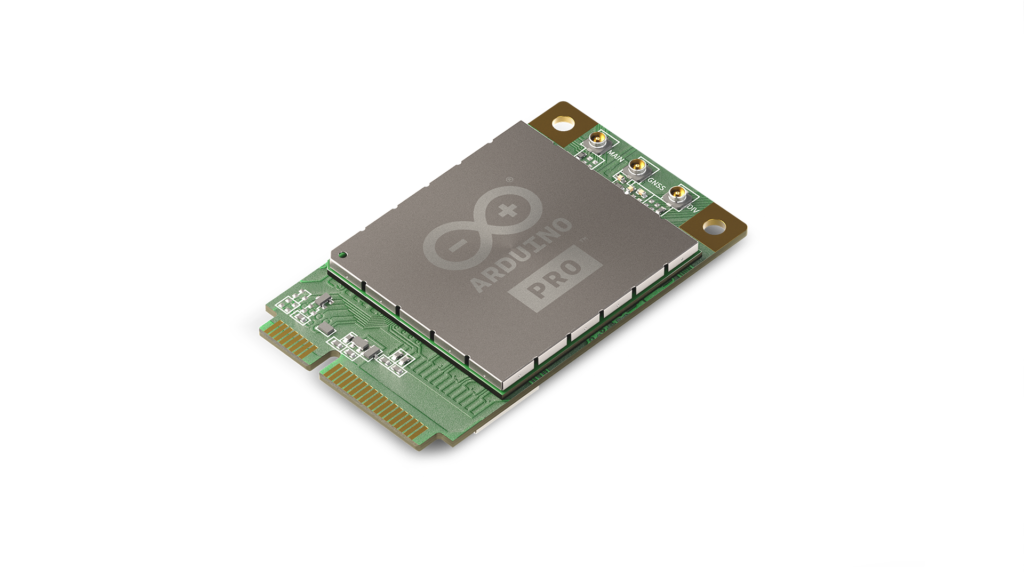
Arduino Pro 4G Module: revolutionizing connectivity
Are you ready to revolutionize your connectivity game? Engineered to seamlessly integrate with the Portenta family, the Arduino Pro 4G Module comes with a plethora of benefits, ensuring your projects thrive with lightning-fast data throughput and high bandwidths, powered by a robust Cat.4 modem from Quectel.
Enjoy secure data transfer, long-range global coverage even in the most isolated locations, and cost-efficient flexibility – all in the widely adopted Mini PCIe form factor: from remote maintenance to building safety inspection, the possibilities are endless.
The full details are available on our website, but you can also jump right to purchase from the Arduino Store!
Embark on your journey of innovation with Arduino’s expanding ecosystem
Our end-to-end ecosystem of hardware, software, and cloud solutions keeps expanding to meet your needs. The Portenta Mid Carrier and Arduino Pro 4G Module are only the latest additions that promise to unlock new realms of creativity and innovation for seasoned developers and passionate hobbyists alike.
So, what are you waiting for? Dive into a world of seamless prototyping and unparalleled connectivity today, with the Portenta Mid Carrier and Arduino Pro 4G Module.
The Adafruit LTC4316 I2C Address Translator does on the fly I2C address translation. There’s an ‘input I2C’ half, and an ‘output I2C’ half. And any devices on the ‘output’ half will automatically have their addresses translated from the input half. Specifically, each device will have bit A6 flipped (most-significant-bit of the address) and then bits A4 and A5 can also be flipped or kept the same, with the two DIP switches on board. To determine the translated address, we use XOR bitwise math.
The Adafruit LTC4316 I2C Address Translator guide has everything you need to get started with using this breakout. There’s pages for overview, pinouts, CircuitPython, Arduino and resources for download.
“Edge AI is a crucial technology in this world of finite resources. It allows us to monitor and optimize consumption in real time: so the use of electricity or water, for example, can be optimized not just for today, but for the future. Manufacturing, agriculture and logistics can minimize their impact, with huge potential for cost savings as well as lowering our carbon footprint,” explains Fabio Violante, CEO of Arduino.
Edge AI has witnessed a remarkable surge in recent years, driven among other factors by the urgent need for efficient resource management and sustainability. Indeed, this technology leverages real-time data analytics and predictive modeling to enable proactive decision-making in a wide variety of sectors.
The 2024 “State of Edge AI” Report, curated by Wevolver, contains a plethora of examples and insights relevant to applications ranging from healthcare to automotive.
For example, edge AI solutions facilitate precision farming practices by analyzing soil moisture levels, weather patterns, and crop health data to optimize irrigation and fertilization, thereby maximizing yields while minimizing environmental impact.
In logistics and transportation networks, deploying AI-powered edge devices in vehicles and infrastructure makes real-time monitoring of traffic conditions and route optimization feasible. This not only improves operational efficiency but also enhances safety by mitigating the risks of accidents and breakdowns. Edge AI also facilitates the development of smart cities by enabling intelligent management of utilities, transportation systems, and public services through seamless integration with IoT devices and sensors deployed across urban environments. This empowers municipalities to optimize resource allocation, reduce congestion, and enhance the overall quality of life for residents.
In addition to optimizing resource and energy use to reduce financial and environmental impacts, edge AI-powered systems can lead to significant cost savings by foreseeing equipment failures. Predictive maintenance was indeed the focus of our contribution to this year’s report, showcasing products like Opta, Nicla Sense ME and Portenta Machine Control and success stories (like AROL’s and Engapplic’s) that bring the benefits of edge AI into the realm of present, tangible opportunities for enterprises in any industry and at any stage of their development.
“Simplicity is the key to success. In the tech world, a solution is only as successful as it is widely accepted, adopted and applied — and not everyone can be an expert. You don’t have to know how electricity works to turn on the lights, how an engine is built to drive a car, or how large language models were developed to write a ChatGPT prompt: that plays a huge part in the popularity of these tools,” Violante adds. “That’s why, at Arduino, we make it our mission to democratize technologies like edge AI — providing simple interfaces, off-the-shelf hardware, readily available software libraries, free tools, shared knowledge, and everything else we can think of. We believe edge AI today can become an accessible, even easy-to-use option, and that more and more people across all industries, in companies of all sizes, will be able to leverage this innovation to solve problems, create value, and grow.”
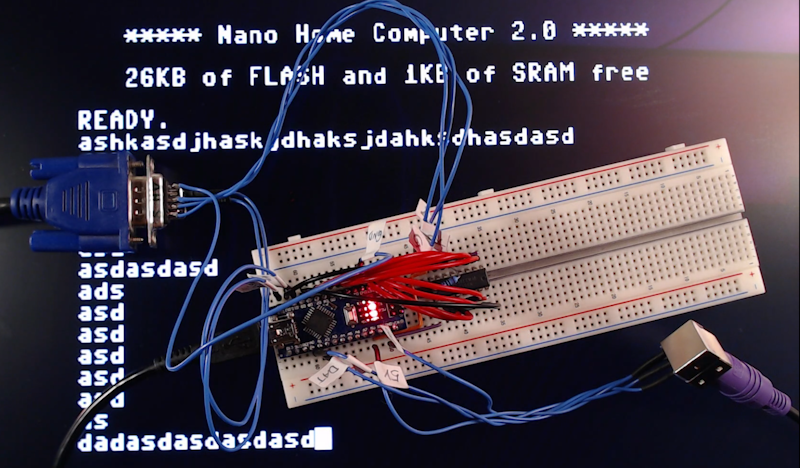
If you’ve ever tried to produce an analog video signal with an Arduino, then you know that it isn’t easy. That’s a bit counterintuitive if you think of analog video as “old” and assume that generating an analog video signal would be trivial with our powerful modern hardware. But there are many ways in which analog signals are tricky and that’s especially true if you want something like VGA output, which requires very precise timing. That’s why it is so impressive that Slu4 was able to build this retro computer with just an Arduino Nano and a shift register.
This was no simple feat and it really showcases Slu4’s programming prowess. His creation can output 320×200 resolution VGA video while reading PS/2 keyboard inputs, with enough processing power leftover to handle basic video game logic and graphics. He demonstrates that with a Tetris-like games that runs very smoothly. And Slu4 says that it is even possible to add 16 colors per row, though he doesn’t show that in action.
Slu4 first achieved a similar result a few years ago, but that required several IC (Integrated Circuit) chips. This version only needs one: a standard 74HC166 shift register. That helped him overcome some of the challenges related to VGA timing, which the Nano’s ATmega328 microcontroller can just barely keep up with. This did necessitate some low-level programming to maximize efficiency, but Slu4 was able to pull it off. Even more impressive, he was able to read PS/2 keyboard input at the same time so the player can control the game.
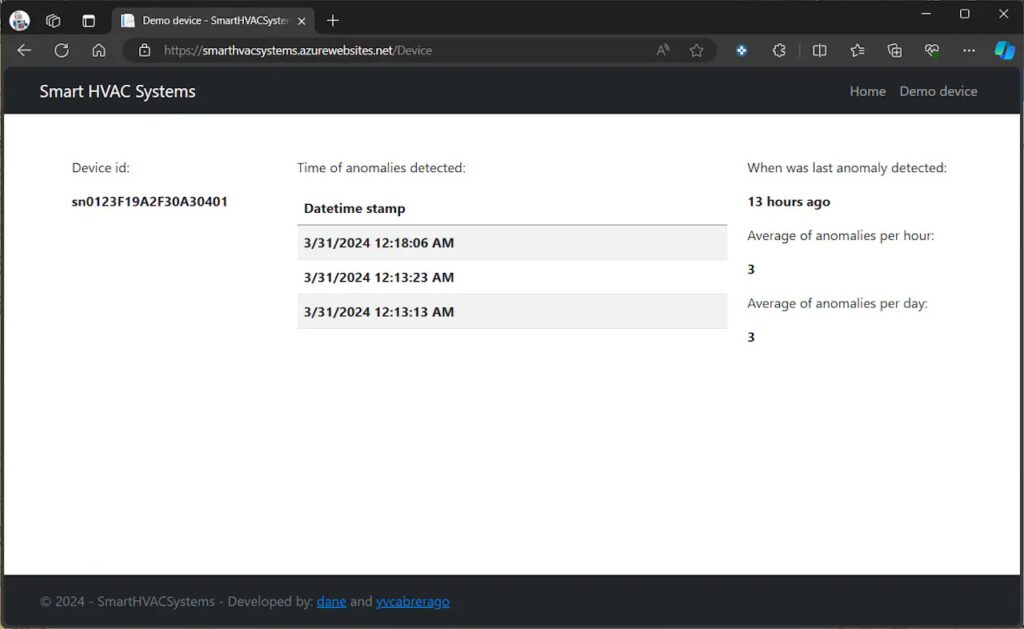
Having constant, reliable access to a working HVAC system is vital for our way of living, as they provide a steady supply of fresh, conditioned air. In an effort to decrease downtime and maintenance costs from failures, Yunior González and Danelis Guillan have developed a prototype device that aims to leverage edge machine learning to predict issues before they occur.
The duo went with a Nicla Sense ME due to its onboard accelerometer, and after collecting many readings from each of the three axes at a 10Hz sampling rate, they imported the data into Edge Impulse to create the model. This time, rather than using a classifier, they utilized a K-means clustering algorithm — which is great at detecting anomalous readings, such as a motor spinning erratically, compared to a steady baseline.
Once the Nicla Sense ME had detected an anomaly, it needed a way to send this data somewhere else and generate an alert. González and Guillan’s setup accomplishes the goal by connecting a Microchip AVR-IoT Cellular Mini board to the Sense ME along with a screen, and upon receiving a digital signal from the Sense ME, the AVR-IoT Cellular Mini logs a failure in an Azure Cosmos DB instance where it can be viewed later on a web app.
Arduino PLC Starter Kit combines the Arduino Opta micro PLC, the Arduino DIN Simul8 digital input simulator and power distribution board, and the Arduino DIN Celsius board with two independent heater circuits and one temperature sensor acting as a temperature laboratory. The kit is supported by the Arduino PLC IDE first introduced in 2022 and comes with various cables and a power supply that allows users to quickly get started. Arduino says the kit targets the education of students aged 17 years and more. It includes 20 hours of lessons going through the history of programmable logic controllers, Modbus RS-485 communications, and how PLCs integrate with industrial simulated systems. The main hardware and software components of the kits are: Arduino Opta WiFi micro PLC based on an STMicro STM32H747XI dual-core Arm Cortex-M7/M4 MCU, offering Ethernet and RS485 communication interfaces, and exposing eight digital/analog inputs, plus four relay outputs. DIN Rail-mountable [...]
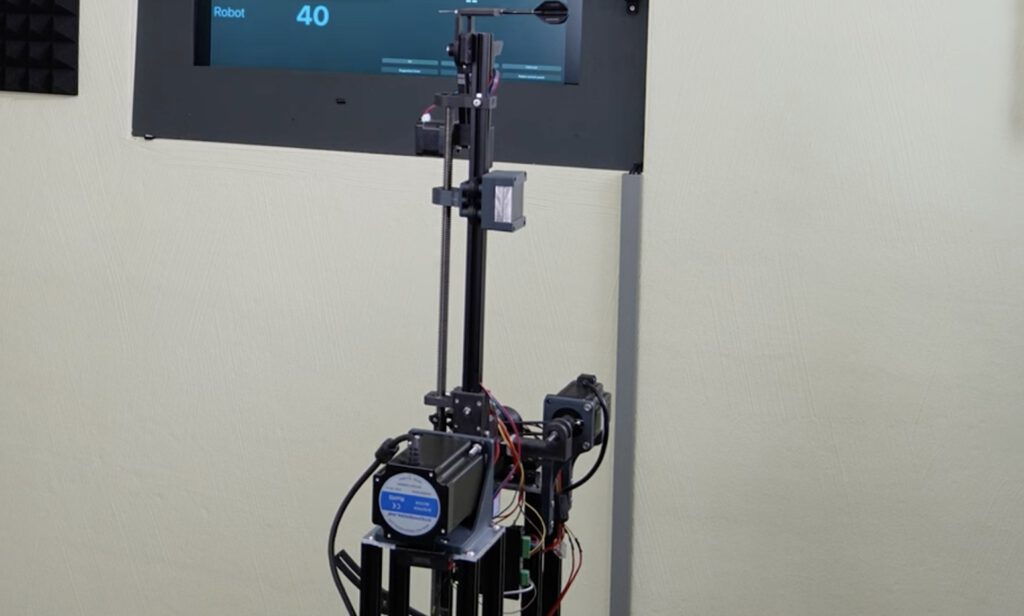
You’ll find dartboards in just about every dive bar in the world, like cheaper and pokier alternatives to pool. But that doesn’t mean that darts is a casual game to everyone. It takes a lot of skill to play on a competitive level and many of us struggle to perform well. Niklas Bommersbach decided that years of practice was too much of a commitment, so he built this robot that can dominate dart games.
This robot can, essentially, throw a dart perfectly every time to hit the desired target on the board. If you’re unfamiliar with the game, you might think that a bullseye is always best. But that isn’t true — especially for certain rulesets. To play strategically, Bommersbach needed his robot to nail the desired space on the board on-demand.
His first step was to make throws repeatable and predictable. His robot has a balanced arm that spins up to a precise rotational speed. At the set angle, it releases the dart. By monitoring many throws with computer vision, Bommersbach was able to dial in the speed and angle variables until the result became very predictable. An Arduino UNO Rev3 board controls the arm speed and calculates the release. But Bommersbach struggled to get the timing of the release exactly right, as the Arduino was running its code sequentially and so there was a small variance — just enough to throw off the throw.
His solution was to add a second Arduino, which has the sole responsibility of releasing the dart using a stepper-actuated mechanism. That allowed for very precise timing and repeatable throws. The timing influences the dart’s vertical position on the board, while a linear motion system controls its horizontal position.
In test matches, Bommersbach’s robot was able to trounce human opponents with ease.
In a world where industrial automation is rapidly advancing, education often struggles to keep pace.
This disconnect leaves a big gap in practical, industry-relevant skills among graduates.
Addressing this critical need, we’re excited to introduce the Arduino PLC Starter Kit. Powered by the robust Arduino Opta mini PLC and backed by the intuitive Arduino PLC IDE, this kit is set to revolutionize programmable logic control education.
Continue reading to find out more about the PLC Starter Kit.
What is the Arduino PLC Starter Kit?
Before we delve into the details of this exciting new offering, let’s explain exactly what a PLC is. A Programmable Logic Controller (PLC) is a type of industrial computer that’s used to automate, control and coordinate a wide range of manufacturing processes and machinery.
The Arduino PLC Starter Kit isn’t just another educational tool; it’s a comprehensive solution designed to bridge the gap between theoretical knowledge and practical application in industrial automation — a powerful simulation tool specifically created for vocational and university students considering a career in manufacturing.
Here’s what this groundbreaking kit offers:
20 hours of in-depth lessons — Explore the world of programmable logic control with the ‘Explore PLC’ course. The course has been created by educators and covers all the essential contents including the history of programmable logic controllers, Modbus RS-485 communications, and how PLCs integrate with industrial simulated systems.
Arduino Opta WiFi — Built with industrial IoT capabilities, our versatile and easy-to-use micro PLC offers real-time control, monitoring, and predictive maintenance for a variety of applications. Based on the existing Arduino Opta WiFi, it includes the STM32H747XI dual-core Arm® Cortex®-M7 +M4 MCU, making it exceptionally reliable and robust for your classroom.
Digital input and output simulators – The kit’s custom-designed hardware helps bring learning to life by allowing users to replicate real-world situations. The input simulator (DIN Simul8) includes 8 switches and power control, while the output simulator (DIN Celsius) features a resistor array and a temperature sensor.
Arduino PLC IDE — Our popular programming tool, Arduino PLC IDE, makes programming simple. Choose from any of the five programming languages defined by the IEC 61131-3 standard (Ladder, Functional Block Diagram, Structured Text, Sequential Function Chart, or Instruction List) to quickly code a range of PLC applications
Arduino IDE 2 — Another benefit of the kit is that it can be programmed using our powerful IDE 2. A step up from the classic Arduino IDE, the Arduino IDE 2 offers increased performance, an improved user interface and other new features, such as autocompletion and a built-in debugger.
And let’s not forget that all the kit’s hardware is fully compatible with the Arduino Cloud.
Get industry-ready with real-life simulations
Thanks to their exceptional flexibility, programmable logic controllers are being used more and more frequently in a wide range of industries. From production plants, assembly lines and packaging machines to heating control systems, traffic lights and elevators, PLC applications are vast and varied.
To help students prepare for the demands of these competitive industries and the challenges they face, we believe they need access to high-quality PLC simulation tools. After all, there’s a big difference between reading about programming in a textbook and actually doing it. As Benjamin Franklin once famously said, “Tell me and I forget, teach me and I may remember, involve me and I learn”. And that’s where the PLC Starter Kit comes into play.
Boasting industrial IoT capabilities, the kit’s Opta WiFi mini PLC — together with the input and output simulators – allows students to design and implement programs that simulate real-life industrial automation projects.
Take a manufacturing production line, for instance. To prevent overheating and a potential fire, the equipment’s PLC might be programmed to shut down when the input sensor detects a high temperature. With the PLC Starter Kit, students can simulate a similar scenario and gain practical knowledge about how inputs and outputs interface with a PLC.
It’s a great way to promote a deeper understanding of industrial automation and system behavior, while giving students the hands-on experience and critical thinking skills they’ll need to tackle real-world challenges in their professional careers.
Try the Arduino PLC Starter Kit today
With its powerful industrial IoT capabilities, easy programming software and wealth of online content, the PLC Starter Kit is the perfect introduction to automated programming for students and educators.
Interested in using the PLC Starter Kit in your education setting? Order the PLC Starter Kit here or get in touch through your local distributor and discover how it can transform your learning environment.
Modular IoT hardware developer, M5Stack, has released a new programmable robot base based on the STM32F030F4 microcontroller with LEGO and Arduino compatibility. The M5Stack BugC2 is “compatible with the M5StickC series controllers,” and includes the ESP32-powered M5StickC Plus2 development kit in the package. It features an L9110S four-way motor driver for all-directional operation, two programmable RGB LEDs, an infrared encoder, and a 16340 rechargeable Li-ion battery holder. It also comes with a USB Type-C port for charging the battery and supports onboard reverse charging protection and voltage detection. Listed applications for the M5Stack BugC2 programmable robot base include remote motor control, robot control, and an intelligent toy. M5Stack BugC2 specifications: Microcontroller – STMicroelectronics STM32F030F4 microcontroller, with Arm 32-bit Cortex-M0 CPU @ 48 MHz, and with up to 256KB of flash memory Motor driver – L9110S Infrared receiver – SL0038GD IR detection distance (StickC Plus2) Infrared emission distance (linear distance) at [...]
Planet Arduino is, or at the moment is wishing to become, an aggregation of public weblogs from around the world written by people who develop, play, think on Arduino platform and his son. The opinions expressed in those weblogs and hence this aggregation are those of the original authors. Entries on this page are owned by their authors. We do not edit, endorse or vouch for the contents of individual posts. For more information about Arduino please visit www.arduino.cc
You are currently browsing the PlanetArduino weblog archives.