12

Roboticists often look to nature for inspiration. That makes sense, because animals are very efficient machines, thanks to millions of years of evolution. Even our most sophisticated technology doesn’t come close to matching a common housefly. But we can get closer to mimicking nature at larger scales, as with this robot created by researchers at EPFL that does a great job of swimming like a lamprey.
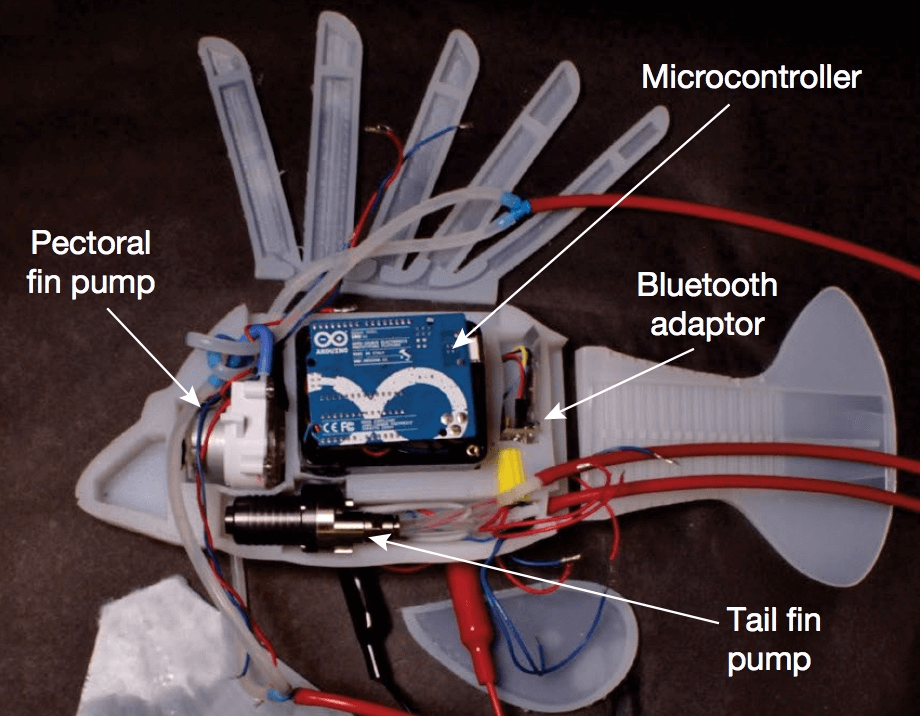
Lampreys are long, jawless fish that often get mistaken for eels. They swim through the water with a motion similar to a snake slithering across loose sand. To replicate that movement, this robot’s body contains numerous segments joined by servo motors. Each segment also has a force plate on each side. That lets the robot sense the pressure of the water against its body as it swims. An Arduino Mini board monitors the plates through force cells and controls the motors.

This unique setup let the researchers study the ability of some vertebrates to move even with a damaged spinal cord. The “healthy” robot can coordinate the movement of all of its motors. But the robot with the simulated spinal cord injury cannot. The motors past the “injury” can only react to the force plates on their own segments. The team found that the robot was still able to swim efficiently, because the force plates provided enough information to control the motors as needed. This provides valuable information in the field of neuroscience and vertebrate nervous systems.
Images: Kamilo Melo, BIOROB-EPFL
The post This strange robotic fish swims like a lamprey appeared first on Arduino Blog.