
23
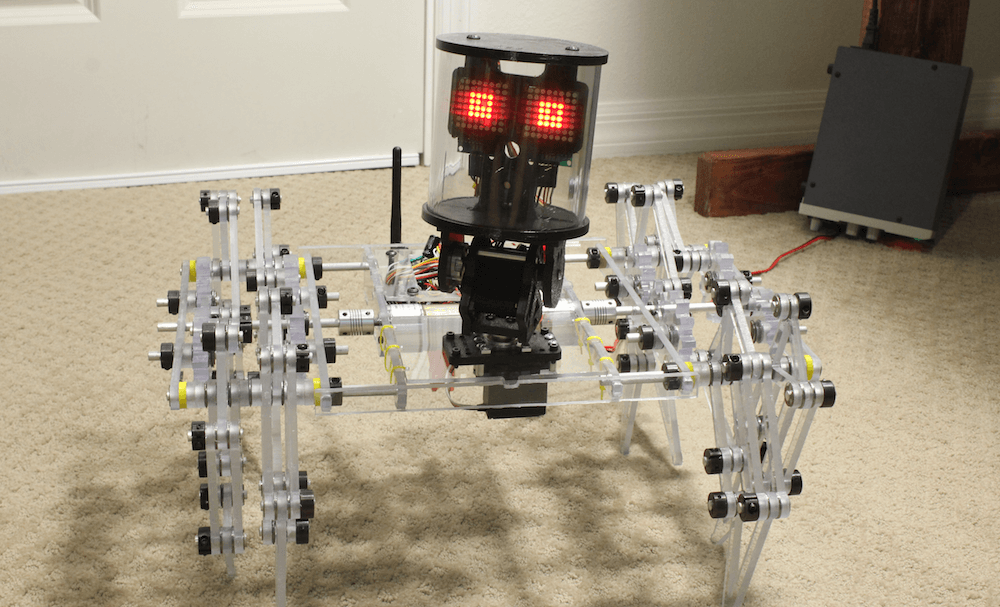
When you want to build a walking robot, the normal route is to individually control each leg with a number of servos or other actuators. Maker Jeremy S. Cook, however, took a different approach with his ‘ClearCrawler,’ using only a pair of motors to power eight legs. These legs are divided up into sets of four on either side of the bot, allowing for differential control similar to a tank.
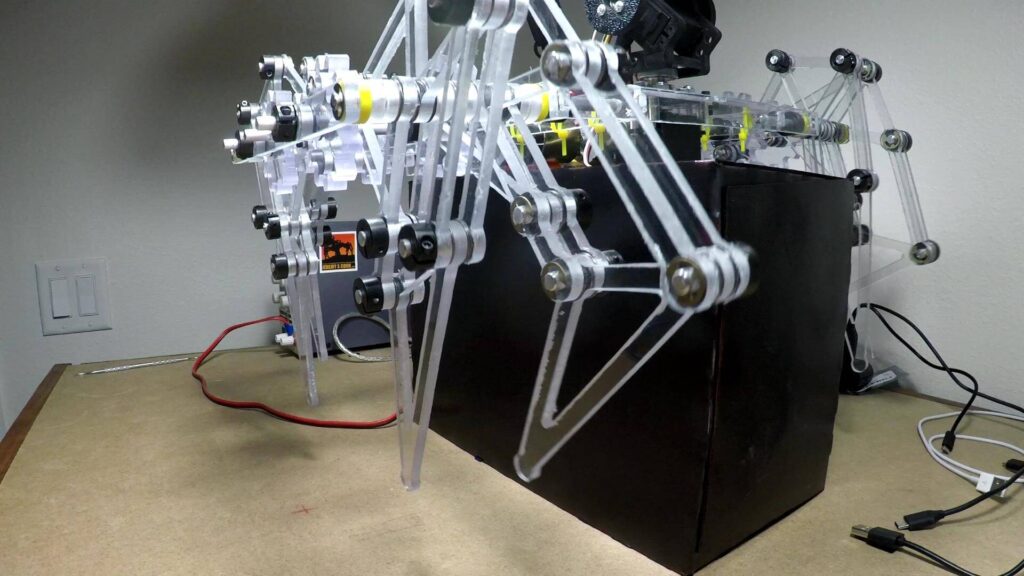
The leg linkage design is based on Theo Jansen’s Strandbeest mechanism, and a clear head is also implemented with a pair of 8×8 MAX7219 LED matrix eyes. Onboard control is handled by an Arduino Nano and an L298N driver board, while an Uno with a joystick shield serves as the user interface. Radio transmission is via two nRF24L01 modules.
Code for both the transmitter and receiver can be found on GitHub.

