
Apr
24
24

Arduino Pro has introduced a groundbreaking solution for IoT development with the launch of 4G global...
The post Arduino Introduces 4G Global Connectivity for Portenta in Mini-PCIe Form Factor appeared first on Electronics-Lab.com.
Arduino Pro has introduced a groundbreaking solution for IoT development with the launch of 4G global...
The post Arduino Introduces 4G Global Connectivity for Portenta in Mini-PCIe Form Factor appeared first on Electronics-Lab.com.

Seon Rozenblum, better known as Unexpected Maker, has launched NANOS3 a development board that claims to be the world’s smallest, fully-featured ESP32-S3 module! This new module packs all the peripherals, and wireless connectivity features of an ESP32-S3 while being even smaller than the TinyPICO Nano. The module features two variants one with an onboard 3D antenna and the other with an u.FL connector. Previously we have written about TinyS3, FeatherS3, and ProS3 boards from Unexpected Maker we have also covered many unique ESP32-S3 boards like the ESP32-S3 PowerFeather Board with solar input, the Waveshare ESP32-S3-Relay-6CH, the ESP32-S3 4G dev boards and more feel free to check those out if you are interested in ESP32 boards with advanced features. Unexpected Maker NANOS3 Specifications ESP32-S3-WROOM-1-N8R2 MCU – ESP32-S3 dual-core Tensilica LX7 up to 240 MHz with 512KB SRAM, 16 KB RTC SRAM Memory – 2MB QSPI PSRAM Storage – 8MB QSPI flash Wireless – [...]
The post Unexpected Maker NANOS3 might be the world’s tiniest ESP32-S3 module, yet fully-featured appeared first on CNX Software - Embedded Systems News.
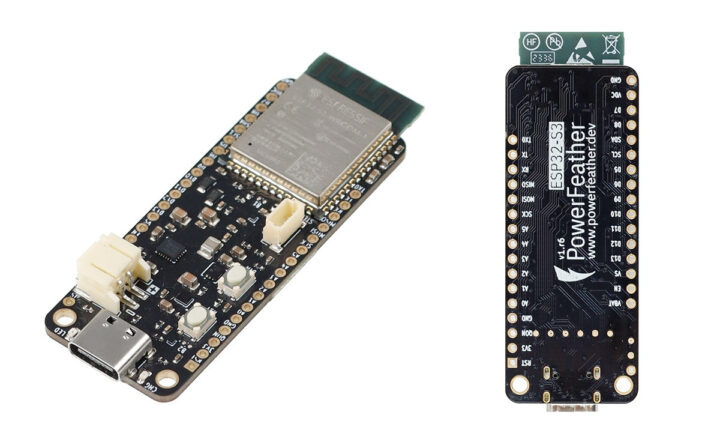
The ESP32-S3 PowerFeather board is an Adafruit Feather-shaped ESP32-S3 WiFi and BLE IoT board that can be powered by a Li-Ion or LiPo battery and supports up to 18V DC input for direct connection to a solar panel. The developer told CNX Software that the main differentiating factor from other ESP32-S3 development boards was “its extensive power management and monitoring features” with a wide DC input range, supply and battery monitoring, and battery protection features. ESP32-S3 PowerFeather specifications: ESP32-S3-WROOM-1-N8R2 MCU – ESP32-S3 dual-core Tensilica LX7 up to 240 MHz with 512KB SRAM, 16 KB RTC SRAM Memory – 2MB QSPI PSRAM Storage – 8MB QSPI flash Wireless – WiFi 4 and Bluetooth 5 LE + Mesh; PCB antenna USB – 1x USB-C 1.1 OTG port for power and programming Expansion 2x 16-pin 2.54 mm pitch headers with 23x multi-function GPIO: UART, I2C, SPI, I2S, SDIO, PWM, CAN, RMT, Camera, LCD [...]
The post ESP32-S3 PowerFeather board supports up to 18V DC for solar panel input appeared first on CNX Software - Embedded Systems News.

Waveshare ESP32-S3-Relay-6CH is a 6-channel WiFi and Bluetooth relay module based on Espressif Systems ESP32-S3 wireless microcontroller that also supports RS485 control and comes with headers taking Raspberry Pi Pico HATs adding RTC, CAN Bus, RS232, LoRa, sensors, or other features. The relays are rated 250VAC/30VDC up to 10A, the system take 7V to 36V DC input through a terminal block, and can be programmed with Arduino or MicroPython though a USB-C port. It also features a a built-in buzzer, an RGB LED, and is housed in a DIN Rail-mountable ABS case. Waveshare ESP32-S3-Relay-6CH specifications: Wireless module – ESP32-S3-WROOM-1U-N8 by default MCU – ESP32-S3 dual-core Tensilica LX7 up to 240 MHz with 512KB SRAM Storage – 8MB Quad SPI flash Wireless – 2.4 GHz WiFi 4 and Bluetooth LE 5 u.FL connector for external antenna 6x relays via terminal blocks Rating – Up to 10A 250V AC / 30V DC [...]
The post 6-channel ESP32-S3-based WiFi relay module offers RS485 interface, supports Raspberry Pi Pico HATs appeared first on CNX Software - Embedded Systems News.
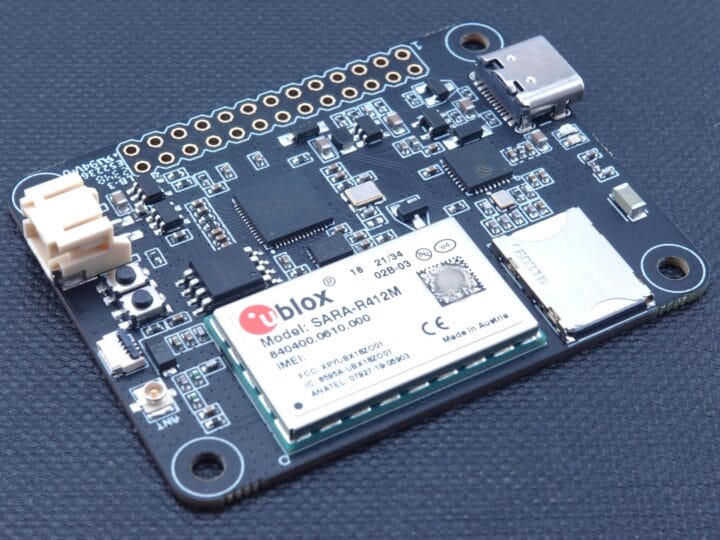
iLABs (Invector Labs), a European embedded equipment manufacturer, has released a new device, the RP2040 Connectivity Board, an IoT development board that is based on Raspberry Pi’s signature microcontroller IC, the RP2040. The RP2040 Connectivity Board features key IoT connectivity options such as LTE, Wi-Fi, and BLE (Bluetooth Low Energy). It is compatible with both Arduino and PlatformIO and is designed for professional and hobbyist users with wide-ranging connectivity needs. The SARA-R412M series module from u-blox handles cellular communication (LTE) and can be configured to enable multi-regional coverage in both GSM and LTE-M/NB-IoT radio transmissions. It features a unique and immutable root of trust and supports IoT security as a service. The RP2040 Connectivity Board also includes an Espressif ESP32-C3FN4 chip for Wi-Fi/BLE communication based on a RISC-V microcontroller core and implementing a Wi-Fi subsystem that complies with the IEEE 802.11b/g/n standard and supports various operating modes. The Bluetooth Low [...]
The post The RP2040 Connectivity Board — An IoT solution combining LTE, Wi-Fi, and BLE into a single platform appeared first on CNX Software - Embedded Systems News.
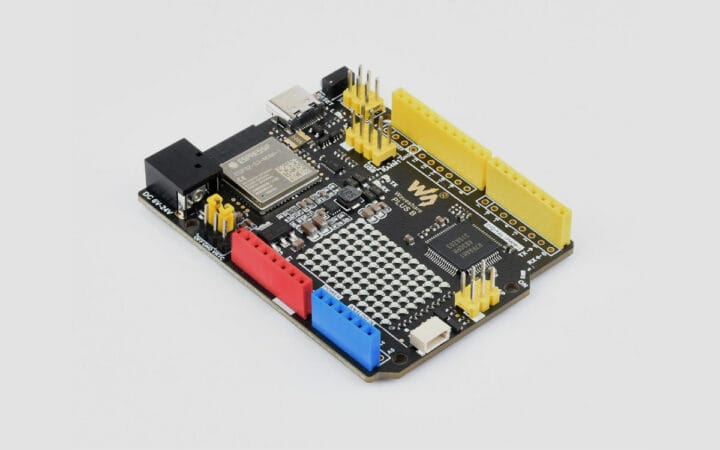
Arduino board clones have been around for many years, but I don’t think I have ever seen clones of the new Renesas-based Arduino boards so far. Waveshare changes that with the R7FA4 PLUS A that clones with Arduino UNO R4 Minima, and the R7FA4 PLUS B board duplicating the Arduino UNO R4 WiFi. The Waveshare boards are not 100% clones with some small differences in the PCB layout, support for 5V and 3.3V shields, an additional 6-pin “power output header” with 5V, 3.3V, and GND signals, and a USB communication jumper to select between the Espressif ESP32-S3 and Renesas RA4M1 microcontrollers. Waveshare R7FA4 PLUS A and B specifications: Microcontroller – Renesas RA4M1 Arm Cortex-M4F MCU @ 48 MHz with 32KB SRAM, 256KB flash Wireless (B model only) – ESP32-S3-MINI-1 module based on ESP32-S3 dual-core Xtensa LX7 microcontroller with 512KB SRAM, 384KB ROM, WiFi 4 and Bluetooth 5.0 connectivity, PCB antenna [...]
The post Waveshare R7FA4 PLUS A and B boards are clones of the Arduino UNO R4 Minima and WiFi appeared first on CNX Software - Embedded Systems News.

Waveshare has recently launched two new ESP32-S3 4G dev boards – the ESP32-S3-SIM7670G-4G and the ESP32-S3-A7670E-4G. These boards support 4G LTE Cat-1, Wi-Fi, Bluetooth, and GNSS, and come with an OV2640 camera, and a battery holder for a 18650 battery. The main difference between the two is that the A7670E module also supports 2G GSM/GPRS/EDGE at 900/1800MHz while the SIM7670G module does not. The board has two rows of I/Os including GPIO, I2C, SPI, ADC, and USB 2.0. It also has a USB-C port for power and programming, a slot for a MicroSD card, and an option to connect an external speaker. There’s a USB switching IC and DIP switch for easily connecting the module to a PC for internet or debugging. Waveshare ESP32-S3 4G Dev Boards Specification: Communication module A7670E 4G – A7670E Cat-1 4G module supporting 4G Cat-1 + 2G networking, GNSS positioning, telephone calls, and SMS. SIM7670G [...]
The post Waveshare ESP32-S3 4G dev boards feature LTE Cat-1, 2G, and camera support appeared first on CNX Software - Embedded Systems News.

SparkFun has launched yet another ESP32-C6 board with the “Thing Plus – ESP32-C6” based on the ESP32-C6-WROOM-1-N16 module with 16MB flash and a PCB antenna and range of I/Os and power options. The board features 28 through holes with up to 23 multi-function GPIOs and a Qwicc connector for expansion, and supports 5V or LiPo battery power through respectively a USB-C port a 2-pin JST connector combined with a charging chip, and a fuel gauge. SparkFun Thing Plus – ESP32-C6 specifications: Wireless module – ESP32-C6-WROOM-1-N16 MCU – ESP32-C6 32-bit single-core RISC-V microcontroller with 2.4 GHz WiFI 6, Bluetooth 5 LE, and 802.15.4 radio (Zigbee and Thread); Matter-compatible Storage – 16 MB flash PCB Antenna Storage – MicroSD card slot USB – 1x USB Type-C port for power and programming Expansion 12-pin + 16-pin headers with 23x multifunctional GPIOs Up to 7x 12-bit ADC channels Up to 2x UART channels (with [...]
The post SparkFun Thing Plus – ESP32-C6 board comes with 16MB flash, LiPo battery support appeared first on CNX Software - Embedded Systems News.
We have very big plans for Arduino Cloud this year, which took a major leap forward with the recent name change. But that’s not all we’re working on. We’ve already got some exciting new features to bring to you, including a watchdog timer that keeps your hardware ticking.
First of all, we’re updating the WiFi module firmware on Arduino Cloud-compatible boards. It’ll be moving to a newer version (1.4.4), as well as the library used to connect devices to Arduino Cloud.
These measures will significantly reduce memory footprint on SAMD. The primary benefit of which is allowing for larger user sketches than was previously possible.
Just follow the process below to update your boards to the latest WiFi firmware.
This release of the Arduino Cloud IoT library also adds watchdog functionality. It’s intended for all ATSAMD21G18-based cloud-connected boards such as MKR boards and Nano 33 IoT.
The watchdog is essentially an electronic timer, counting down from a preset value. When it hits zero, the watchdog triggers a reset of the microcontroller. The timer is periodically reset to its starting value at the beginning of the loop() function, which means the software is running smoothly.
Should something on your Arduino board crash, the starting value doesn’t get reset and the watchdog eventually restarts it. This will save you a lot of time as it helps to automatically recover from temporary hardware faults or unrecoverable software errors whenever you have an unattended or remote device. Watchdog enabled by default, but can easily be disabled, should you wish to.
You can read more about the new watchdog functionality here. Come and join us on the forum to let us know how the new features are working out for you.
The post More Memory and New Watchdog Features for Arduino Cloud Library appeared first on Arduino Blog.
Obviously, we would never endorse cheating on an exam, but sometimes a device is just too tempting to be left untouched. For [Neutrino], it was an old Casio calculator that happened to have a perfectly sized solar panel to fit a 128×32 OLED as replacement. But since the display won’t do much on its own, he decided to connect it to an ESP8266 and mount it all inside the calculator’s housing, turning it into a spy-worthy, internet-connected cheating device, including a stealthy user interface controlled by magnets instead of physical buttons. (Video, embedded below.)
To achieve the latter, [Neutrino] added two Hall effect sensors and a reed switch inside each end of the calculator. Placing a magnet — possibly hidden in a pen cap — near the reed switch will turn the display on, and placing another magnet near the Hall-effect sensors will navigate through the display’s interface, supporting two inputs with long, short, and multi-tap gestures each. To obtain information through WiFi, the ESP8266 connects to Firebase as backend, allowing to set up predefined content to fetch, as well as a possibility to communicate with your partner(s) in crime through a simple chat program.
As the main idea was to keep visible modifications to a minimum, one shortcoming is that charging the additional battery that powers the whole system would require an additional, external charging circuit. But [Neutrino] had a solution for that as well, and simply exposed two wires to the back, which could easily be mistaken for random solder splatters. And well, of course, requiring WiFi might also be tricky in some situations, so maybe you might want to consider a mobile network upgrade for yourself.
Planet Arduino is, or at the moment is wishing to become, an aggregation of public weblogs from around the world written by people who develop, play, think on Arduino platform and his son. The opinions expressed in those weblogs and hence this aggregation are those of the original authors. Entries on this page are owned by their authors. We do not edit, endorse or vouch for the contents of individual posts. For more information about Arduino please visit www.arduino.cc
You are currently browsing the archives for the wifi category.
 Arduino Blog Make Magazine Blog Hackaday Electronics-Lab Noel Portugal CNX-Software Matthew Rollings Chris Debenham Techatronic Giasone John Boxall Arduino++ Adafruit Blog EngineeringException Mamaus's Blog Tinker Hobby Bits and Pieces Wayne and Layne NerdyTechy Liudr's Blog Steve Marple b7arduino Chipwired Embedded-Lab
Arduino Blog Make Magazine Blog Hackaday Electronics-Lab Noel Portugal CNX-Software Matthew Rollings Chris Debenham Techatronic Giasone John Boxall Arduino++ Adafruit Blog EngineeringException Mamaus's Blog Tinker Hobby Bits and Pieces Wayne and Layne NerdyTechy Liudr's Blog Steve Marple b7arduino Chipwired Embedded-Lab 