
Jan
05
05
Kalman Filter for Arduino and C# Test Harness
C, kalman filter, Senza categoria, stability, test harness Comments Off on Kalman Filter for Arduino and C# Test Harness
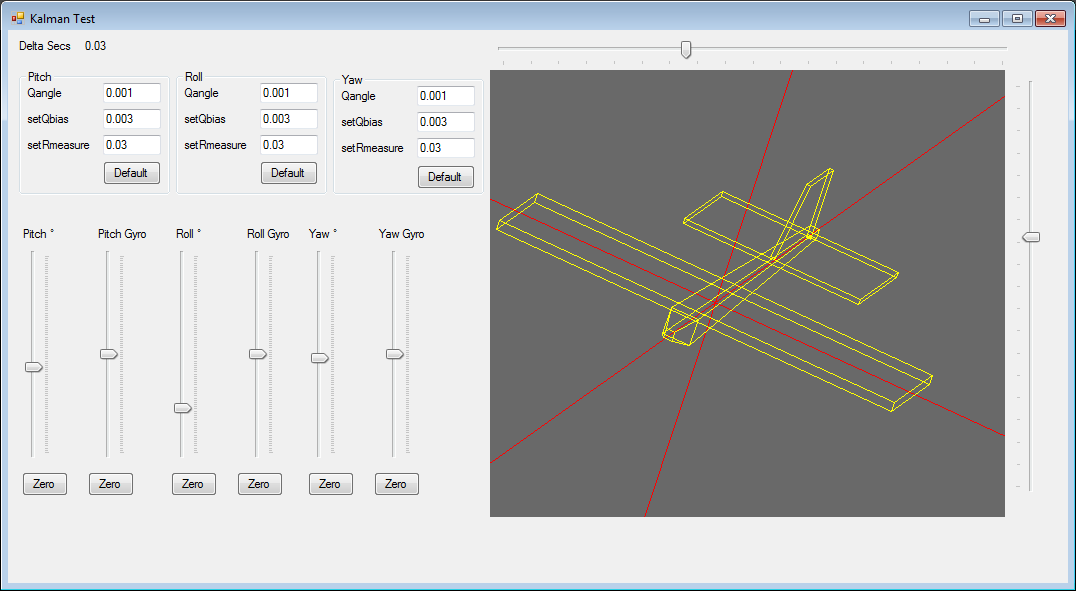
Kalman filter test harness with mimic C# code converted from Arduino code originally writen by Kristian Lauszus, TKJ Electronics.
The filter inputs in the test harness are driven from the sliders but could easily be fed from a real sensor. Another day perhaps?
The whole project is here Kalman Test
The C# class
/* Copyright (C) 2012 Kristian Lauszus, TKJ Electronics. All rights reserved.
This software may be distributed and modified under the terms of the GNU
General Public License version 2 (GPL2) as published by the Free Software
Foundation and appearing in the file GPL2.TXT included in the packaging of
this file. Please note that GPL2 Section 2[b] requires that all works based
on this software must also be made publicly available under the terms of
the GPL2 ("Copyleft").
Contact information
-------------------
Kristian Lauszus, TKJ Electronics
Web : http://www.tkjelectronics.com
e-mail : kristianl@tkjelectronics.com
*/
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace KalmanTest
{
public class Kalman
{
/* variables */
double Q_angle; // Process noise variance for the accelerometer
double Q_bias; // Process noise variance for the gyro bias
double R_measure; // Measurement noise variance - this is actually the variance of the measurement noise
double angle; // The angle calculated by the Kalman filter - part of the 2x1 state matrix
double bias; // The gyro bias calculated by the Kalman filter - part of the 2x1 state matrix
double rate; // Unbiased rate calculated from the rate and the calculated bias - you have to call getAngle to update the rate
double[,] P = new double[2,2]; // Error covariance matrix - This is a 2x2 matrix
double[] K = new double[2]; // Kalman gain - This is a 2x1 matrix
double y; // Angle difference - 1x1 matrix
double S; // Estimate error - 1x1 matrix
public Kalman() {
/* We will set the varibles like so, these can also be tuned by the user */
Reset();
// Reset bias
// Since we assume tha the bias is 0 and we know the starting angle (use setAngle),
//the error covariance matrix is set like so - see: http://en.wikipedia.org/wiki/Kalman_filter#Example_application.2C_technical
SetDefaults();
}
// The angle should be in degrees and the rate should be in degrees per second and the delta time in seconds
public double getAngle(double newAngle, double newRate, double dt) {
// KasBot V2 - Kalman filter module - http://www.x-firm.com/?page_id=145
// Modified by Kristian Lauszus
// See my blog post for more information: http://blog.tkjelectronics.dk/2012/09/a-practical-approach-to-kalman-filter-and-how-to-implement-it
// Discrete Kalman filter time update equations - Time Update ("Predict")
// Update xhat - Project the state ahead
/* Step 1 */
rate = newRate - bias;
angle += dt * rate;
// Update estimation error covariance - Project the error covariance ahead
/* Step 2 */
P[0,0] += dt * (dt*P[1,1] - P[0,1] - P[1,0] + Q_angle);
P[0,1] -= dt * P[1,1];
P[1,0] -= dt * P[1,1];
P[1,1] += Q_bias * dt;
// Discrete Kalman filter measurement update equations - Measurement Update ("Correct")
// Calculate Kalman gain - Compute the Kalman gain
/* Step 4 */
S = P[0,0] + R_measure;
/* Step 5 */
K[0] = P[0,0] / S;
K[1] = P[1,0] / S;
// Calculate angle and bias - Update estimate with measurement zk (newAngle)
/* Step 3 */
y = newAngle - angle;
/* Step 6 */
angle += K[0] * y;
bias += K[1] * y;
// Calculate estimation error covariance - Update the error covariance
/* Step 7 */
P[0,0] -= K[0] * P[0,0];
P[0,1] -= K[0] * P[0,1];
P[1,0] -= K[1] * P[0,0];
P[1,1] -= K[1] * P[0,1];
return angle;
}
public void setAngle(double newAngle) { angle = newAngle; } // Used to set angle, this should be set as the starting angle
public double getRate() { return rate; } // Return the unbiased rate
/* These are used to tune the Kalman filter */
public void setQangle(double newQ_angle) { Q_angle = newQ_angle; }
public double getQangle() { return Q_angle; }
public void setQbias(double newQ_bias) { Q_bias = newQ_bias; }
public double getQbias() { return Q_bias; }
public void setRmeasure(double newR_measure) { R_measure = newR_measure; }
public double getRmeasure() { return R_measure; }
public void Reset()
{
bias = 0; // Reset bias
P[0, 0] = 0; // Since we assume tha the bias is 0 and we know the starting angle (use setAngle), the error covariance matrix is set like so - see: http://en.wikipedia.org/wiki/Kalman_filter#Example_application.2C_technical
P[0, 1] = 0;
P[1, 0] = 0;
P[1, 1] = 0;
}
public void SetDefaults()
{
/* We will set the varibles like so, these can also be tuned by the user */
Q_angle = 0.001;
Q_bias = 0.003;
R_measure = 0.03;
}
}//End of class
}
The filter inputs in the test harness are driven from the sliders but could easily be fed from a real sensor. Another day perhaps?
The whole project is here Kalman Test
The C# class
/* Copyright (C) 2012 Kristian Lauszus, TKJ Electronics. All rights reserved.
This software may be distributed and modified under the terms of the GNU
General Public License version 2 (GPL2) as published by the Free Software
Foundation and appearing in the file GPL2.TXT included in the packaging of
this file. Please note that GPL2 Section 2[b] requires that all works based
on this software must also be made publicly available under the terms of
the GPL2 ("Copyleft").
Contact information
-------------------
Kristian Lauszus, TKJ Electronics
Web : http://www.tkjelectronics.com
e-mail : kristianl@tkjelectronics.com
*/
using System;
using System.Collections.Generic;
using System.Linq;
using System.Text;
namespace KalmanTest
{
public class Kalman
{
/* variables */
double Q_angle; // Process noise variance for the accelerometer
double Q_bias; // Process noise variance for the gyro bias
double R_measure; // Measurement noise variance - this is actually the variance of the measurement noise
double angle; // The angle calculated by the Kalman filter - part of the 2x1 state matrix
double bias; // The gyro bias calculated by the Kalman filter - part of the 2x1 state matrix
double rate; // Unbiased rate calculated from the rate and the calculated bias - you have to call getAngle to update the rate
double[,] P = new double[2,2]; // Error covariance matrix - This is a 2x2 matrix
double[] K = new double[2]; // Kalman gain - This is a 2x1 matrix
double y; // Angle difference - 1x1 matrix
double S; // Estimate error - 1x1 matrix
public Kalman() {
/* We will set the varibles like so, these can also be tuned by the user */
Reset();
// Reset bias
// Since we assume tha the bias is 0 and we know the starting angle (use setAngle),
//the error covariance matrix is set like so - see: http://en.wikipedia.org/wiki/Kalman_filter#Example_application.2C_technical
SetDefaults();
}
// The angle should be in degrees and the rate should be in degrees per second and the delta time in seconds
public double getAngle(double newAngle, double newRate, double dt) {
// KasBot V2 - Kalman filter module - http://www.x-firm.com/?page_id=145
// Modified by Kristian Lauszus
// See my blog post for more information: http://blog.tkjelectronics.dk/2012/09/a-practical-approach-to-kalman-filter-and-how-to-implement-it
// Discrete Kalman filter time update equations - Time Update ("Predict")
// Update xhat - Project the state ahead
/* Step 1 */
rate = newRate - bias;
angle += dt * rate;
// Update estimation error covariance - Project the error covariance ahead
/* Step 2 */
P[0,0] += dt * (dt*P[1,1] - P[0,1] - P[1,0] + Q_angle);
P[0,1] -= dt * P[1,1];
P[1,0] -= dt * P[1,1];
P[1,1] += Q_bias * dt;
// Discrete Kalman filter measurement update equations - Measurement Update ("Correct")
// Calculate Kalman gain - Compute the Kalman gain
/* Step 4 */
S = P[0,0] + R_measure;
/* Step 5 */
K[0] = P[0,0] / S;
K[1] = P[1,0] / S;
// Calculate angle and bias - Update estimate with measurement zk (newAngle)
/* Step 3 */
y = newAngle - angle;
/* Step 6 */
angle += K[0] * y;
bias += K[1] * y;
// Calculate estimation error covariance - Update the error covariance
/* Step 7 */
P[0,0] -= K[0] * P[0,0];
P[0,1] -= K[0] * P[0,1];
P[1,0] -= K[1] * P[0,0];
P[1,1] -= K[1] * P[0,1];
return angle;
}
public void setAngle(double newAngle) { angle = newAngle; } // Used to set angle, this should be set as the starting angle
public double getRate() { return rate; } // Return the unbiased rate
/* These are used to tune the Kalman filter */
public void setQangle(double newQ_angle) { Q_angle = newQ_angle; }
public double getQangle() { return Q_angle; }
public void setQbias(double newQ_bias) { Q_bias = newQ_bias; }
public double getQbias() { return Q_bias; }
public void setRmeasure(double newR_measure) { R_measure = newR_measure; }
public double getRmeasure() { return R_measure; }
public void Reset()
{
bias = 0; // Reset bias
P[0, 0] = 0; // Since we assume tha the bias is 0 and we know the starting angle (use setAngle), the error covariance matrix is set like so - see: http://en.wikipedia.org/wiki/Kalman_filter#Example_application.2C_technical
P[0, 1] = 0;
P[1, 0] = 0;
P[1, 1] = 0;
}
public void SetDefaults()
{
/* We will set the varibles like so, these can also be tuned by the user */
Q_angle = 0.001;
Q_bias = 0.003;
R_measure = 0.03;
}
}//End of class
}





